Linear Kalman Filter 卡尔曼滤波不同于传统的具有频域选频特性的滤波器,它是一种时域滤波器,更准取地说它是一种最优估计方法,可以根据已知的先验知识,预测下一个时刻的估计值。
滤波的本质是加权,对应到卡尔曼滤波中,这个权重由卡尔曼增益 决定,它融合的数据有两个:满足一定分布的先验状态估计值、满足一定分布的观测值。
本节讨论的是线性卡尔曼滤波(Linear Kalman Filter, LKF),一般不加特殊说明时,卡尔曼滤波都是指线性卡尔曼滤波,也就是 KF = LKF。非线性的情况有其他的卡尔曼滤波变体,例如扩展卡尔曼滤波 EKF、无迹卡尔曼滤波 UKF 等。
The following content is referenced from: KalmanFilter.NET .
一维无过程噪声 KF
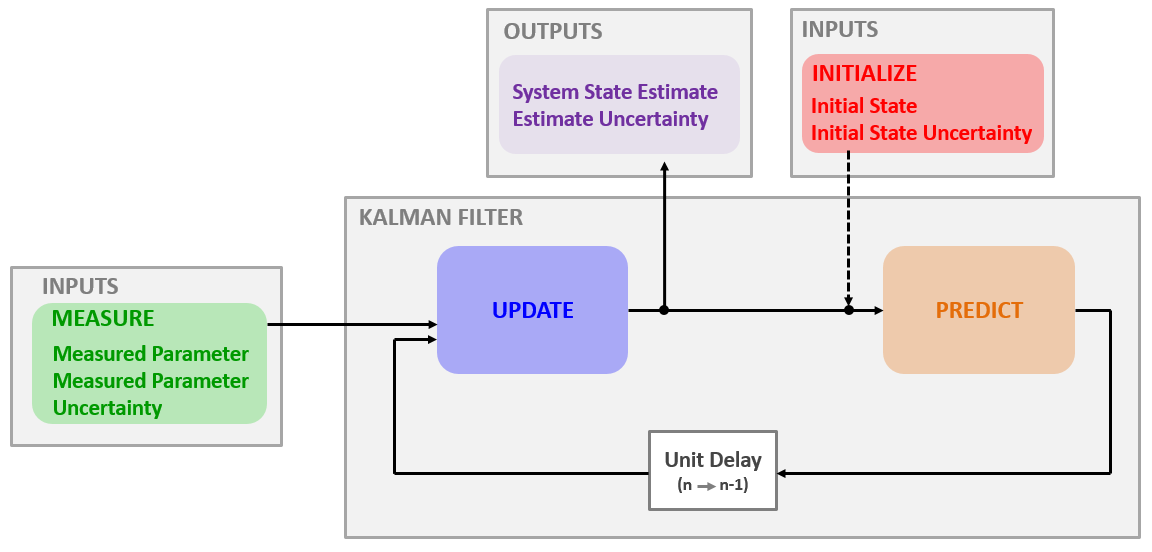
卡尔曼滤波的核心步骤是“测量、更新、预测”。它将测量值、当前状态估计和下一个状态预测都视为正态分布的随机变量。
对随机变量进行估计时,称估计值和真值之间的差为“估计误差”。随着时间不断增长,估计误差不断下降最终收敛到 0。实际中我们并不知道估计误差,因为真值是未知的,但是我们可以计算估计值的不确定性,也就是状态估计值的方差 为 \(p\) .
对随机变量进行测量时,称测量值和真值之间的差为“测量误差”。测量误差是随机的,一般使用正态分布的方差 \(\sigma^2\) 描述,对应的标准差 \(\sigma\) 称为测量不确定性。记测量值的方差 为 \(r\) . 最常见的是测量设备,比如雷达的测量的不确定性。
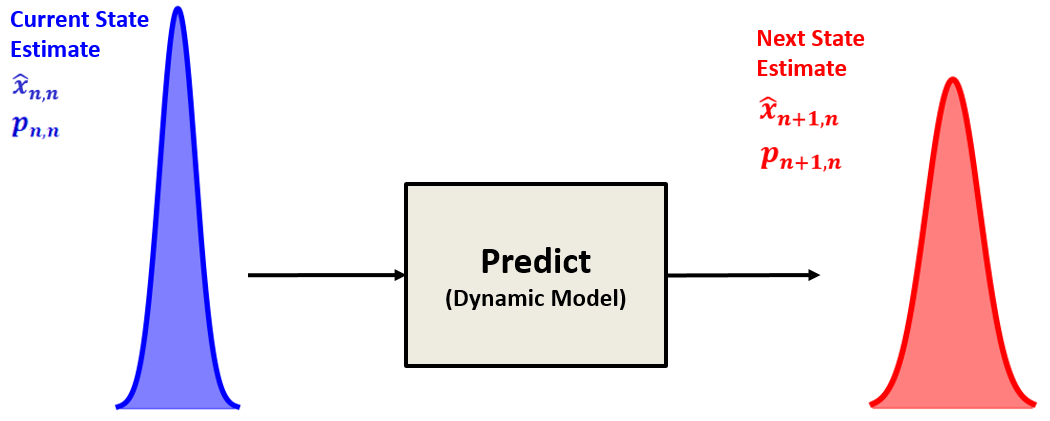
状态的预测。根据当前状态的估计值,结合我们建立的系统动态模型(例如匀速直线运动、匀加速直线运动),对下一个时刻的状态值进行预测。等到下一个时刻,这个预测值就是下一时刻的“先验估计”。
对匀速运动目标进行跟踪 设状态变量 \([x,v]^T\) ,采样周期 \(\Delta t=0.1\text{s}\) ,状态转移方程为:
\[ \hat x_{n|n-1}=\hat x_{n-1|n-1}+\hat v_{n-1|n-1}\Delta t,\quad \hat v_{n|n-1}=\hat v_{n-1|n-1} \]
简写为状态转移矩阵:
\[ \hat x_{n|n-1}=F\hat x_{n-1|n-1},\quad F=\begin{pmatrix}1&\Delta t \\ 0&1 \end{pmatrix} \]
若在 \(n-1\) 时刻校正后得到 \(\hat x_{n-1|n-1}=[10,\;1]^T\) (位置 10m、速度 1m/s),则预测到 \(n\) 时刻的先验 为 \(\hat x_{n|n-1}=[10.1,\;1]^T\) . 等真正经过一个采样周期到达 \(n\) 时刻,拿到观测 \(z_n\) 后,再把 \(\hat x_{n|n-1}\) 校正为 \(\hat x_{n|n}\) ,这又变成这一时刻的后验 。
这个预测过程相当于一个“外插”。卡尔曼滤波将状态的估计视为一个随机变量,因此除了估计状态变量本身,还需要对它的方差/协方差进行估计。
接着上面的例子 位置估计和速度估计的不确定性可以外插为:
\[ p_{n|n-1}^x=p_{n-1|n-1}^x+p_{n-1|n-1}^v \Delta t^2,\quad p_{n|n-1}^v=p_{n-1|n-1}^v \]
即假设模型匀速的情况下,位置预测的方差等于当前位置估计的方差加上当前速度估计的方差乘以时间间隔的平方,预测速度的方差等于当前速度的方差。上述方程也称为协方差外插方程 。
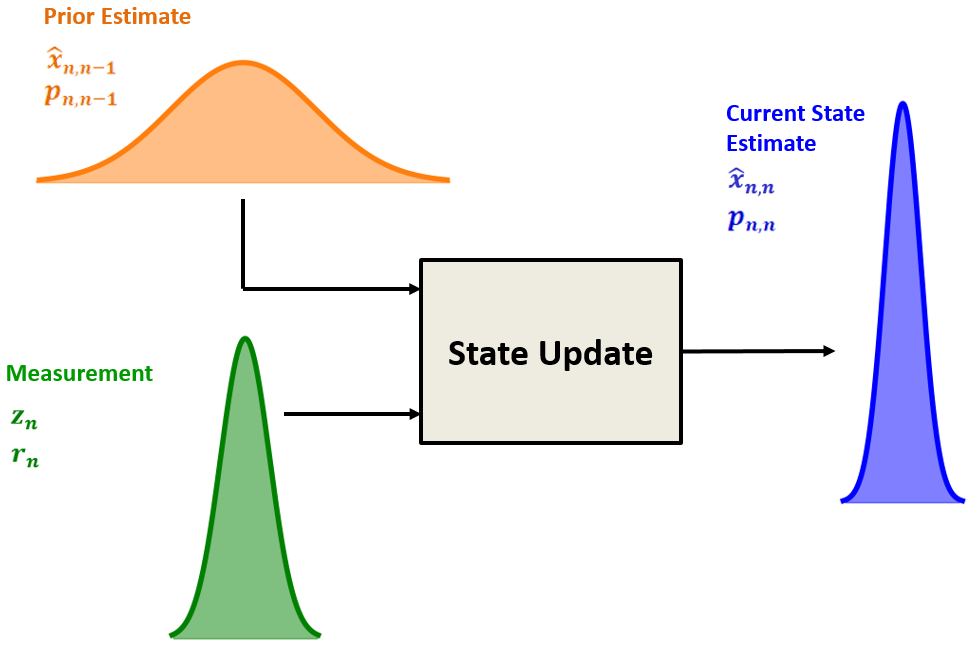
状态的更新。每一个时刻,我们使用当前的两个随机变量来估计当前系统的状态:上一个时刻对当前时刻的预测、当前时刻的测量值。卡尔曼滤波器是一种最优滤波器,最优性体现在它能够把上述状态预测和测量值融合在一起,使得得到的当前状态方差最小。
我们将状态估计值和写为状态预测值和测量值的加权和形式:
\[ \hat x_{n|n} = \lambda z_n + (1-\lambda) \hat x_{n|n-1},\quad p_{n|n}=\lambda^2 r_n+(1-\lambda)^2 p_{n|n-1} \]
其中 \(p_{n|n}\) 即为最优估计 \(\hat x_{n|n}\) 的方差, \(r_n\) 为测量值 \(z_n\) 的方差。权重 \(\lambda>0\) 代表了状态估计值和测量值之间选择的偏好。例如如果使用的雷达精度较高,对应的 \(\lambda\) 应该较大,更倾向于相信雷达的测量值。
我们希望最小化状态估计值 \(\hat x_{n|n}\) 的方差 \(p_{n|n}\) ,因此对其求导:
\[ \frac{\mathrm{d}p_{n|n}}{\mathrm{d}\lambda}=2\lambda r_n-2(1-\lambda)p_{n|n-1}=0 \implies \lambda=\frac{p_{n|n-1}}{p_{n|n-1}+r_n} \]
因此最优估计的公式,也即卡尔曼增益方程 为:
\[ \hat x_{n|n} =\hat x_{n|n-1} + K_n (z_n-\hat x_{n|n-1}),\quad K_n=\frac{p_{n|n-1}}{p_{n|n-1}+r_n} \]
称这个权重 \(K_n\) 为卡尔曼增益 ,它也是一个随时间更新的变量。卡尔曼增益越高,越相信测量值,代表了有多少测量值进入到最终的估计值。
将 \(K_n\) 带入协方差更新公式:
\[ \begin{align*} p_{n|n}&= \left(\frac{p_{n|n-1}}{p_{n|n-1}+r_n}\right)^2 r_n + \left(\frac{r_n}{p_{n|n-1}+r_n}\right)^2 p_{n|n-1} \\ &= \frac{p_{n|n-1}^2 r_n}{(p_{n|n-1}+r_n)^2} + \frac{r_n^2 p_{n|n-1}}{(p_{n|n-1}+r_n)^2} \\ &= \frac{p_{n|n-1} r_n}{p_{n|n-1}+r_n} \left(\frac{p_{n|n-1}}{p_{n|n-1}+r_n} + \frac{r_n}{p_{n|n-1}+r_n}\right) \\ &= (1 - K_n) p_{n|n-1} (K_n + (1 - K_n)) \\ &= (1 - K_n) p_{n|n-1} \end{align*} \]
得到协方差更新方程:
\[ p_{n|n}=(1 - K_n) p_{n|n-1} \]
由方程可知 \(1-K_n<1\) ,状态估计的方差是始终随着滤波器迭代而下降。当测量不确定性很高时,卡尔曼增益很低,几乎只依赖状态预测值,因此状态估计不确定性收敛的速度会较慢;相反当测量不确定性很低时,卡尔曼增益很高,几乎只依赖测量值,因此状态估计不确定性会快速收敛到0。
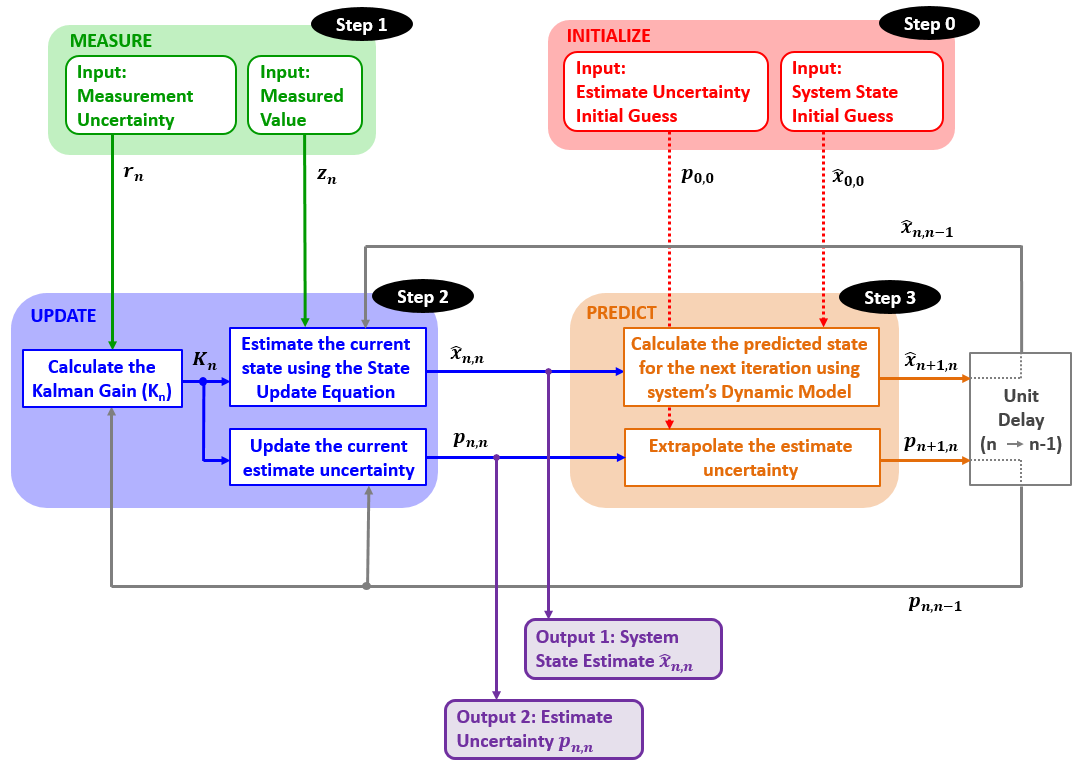
由此我们可以总结卡尔曼滤波的整体框架:
滤波器的输入为:
初始化 初始状态 \(\hat x_{0|0}\) 初始状态方差 \(p_{0|0}\) 初始化参数可以由其他的系统、过程(例如雷达的搜索模式)或基于经验和理论知识所得出的合理的猜测来获得。即使初始化参数不太准确,卡尔曼滤波器也能收敛到接近真值。
测量 每个滤波器采样周期都要进行测量。每次测量得到两个参数:
测量值 \(z_n\) 测量方差 \(r_n\) 滤波器的输出为:
状态估计 \(\hat x_{n|n}\) 状态估计方差 \(p_{n|n}\) 5个核心方程(以一维匀速运动为例):
状态更新阶段:
卡尔曼增益 Kalman Gain: \(K_n=\dfrac{p_{n|n-1}}{p_{n|n-1}+r_n}\) 状态更新 State Update: \(\hat x_{n|n} =\hat x_{n|n-1} + K_n (z_n-\hat x_{n|n-1})\) 协方差更新 Covariance: \(p_{n|n}=(1-K_n)p_{n|n-1}\) 状态预测阶段:
状态转移/外插 Transition Equation: \(\hat x_{n|n-1}=\hat x_{n-1|n-1}+\hat v_{n-1|n-1}\Delta t,\quad\hat v_{n|n-1}=\hat v_{n-1|n-1}\) 协方差转移/外插: \(p_{n|n-1}^x=p_{n-1|n-1}^x+p_{n-1|n-1}^v \Delta t^2,\quad p_{n|n-1}^v=p_{n-1|n-1}^v\) 一维 KF 上述讨论的“一维无过程噪声 KF”中,我们没有考虑过程噪声。真实世界中,系统动力模型总是有不确定性的。比如我们想测量一个电阻的阻值,我们假设它是不变的,即阻值不随测量过程而改变,但实际上阻值会随着环境温度的改变而轻微改变。再比如用雷达追踪弹道导弹时,导弹动态模型的不确定性会包含一些随机的加减速。对于飞行器之类的目标,模型不确定性更大,因为飞行员随时可能进行机动。另一方面,当我们用 GPS 接收机计算一个固定物体的位置时,由于固定物体不会动,所以动态模型不确定性为 0。动态模型的不确定性称为过程噪声,也叫模型噪声、驱动噪声、动态噪声或系统噪声。过程噪声也会带来估计误差。
过程噪声的方差使用 \(q\) 表示。协方差外插方程中,还应该加上过程噪声的影响:
\[ p_{n|n-1}=p_{n-1|n-1}+q_{n-1} \]
加入过程噪声后,完整的一维卡尔曼滤波方程 为:
卡尔曼增益 Kalman Gain: \(K_n=\dfrac{p_{n|n-1}}{p_{n|n-1}+r_n}\) 状态更新 State Update: \(\hat x_{n|n} =\hat x_{n|n-1} + K_n (z_n-\hat x_{n|n-1})\) 协方差更新 Covariance: \(p_{n|n}=(1-K_n)p_{n|n-1}\) 状态预测阶段:
状态转移/外插 Transition Equation: \(\hat x_{n|n-1}=\hat x_{n-1|n-1}+\hat v_{n-1|n-1}\Delta t,\quad\hat v_{n|n-1}=\hat v_{n-1|n-1}\) 协方差转移/外插: \(p_{n|n-1}^x=p_{n-1|n-1}^x+p_{n-1|n-1}^v \Delta t^2,\quad p_{n|n-1}^v=p_{n-1|n-1}^v+q_{n-1}\) Note
卡尔曼滤波方程是针对特定的简单问题的简单形式,重在理解卡尔曼滤波的基本原理和本质。卡尔曼滤波的一般形式在后续会以矩阵形式给出。
多维 KF 现在我们将一维卡尔曼滤波扩展到多维卡尔曼滤波。例如在三维空间中,我们追踪一个目标的位置,可以考虑其坐标、速度、加速度等:
\[ \begin{pmatrix} x \\ y \\ z \end{pmatrix} \text{ or } \begin{pmatrix} x \\ y \\ z \\ v_x \\ v_y \\ v_z \end{pmatrix} \text{ or } \begin{pmatrix} x \\ y \\ z \\ v_x \\ v_y \\ v_z \\ a_x \\ a_y \\ a_z \end{pmatrix} \]
使用匀加速运动模型:
\[ \begin{cases} x_n = x_{n-1} + v_{x,n-1}\Delta t + \frac{1}{2}a_{x,n-1}\Delta t^2 \\ y_n = y_{n-1} + v_{y,n-1}\Delta t + \frac{1}{2}a_{y,n-1}\Delta t^2 \\ z_n = z_{n-1} + v_{z,n-1}\Delta t + \frac{1}{2}a_{z,n-1}\Delta t^2 \\ v_{x,n}= v_{x,n-1} + a_{x,n-1}\Delta t \\ v_{y,n} = v_{y,n-1} + a_{y,n-1}\Delta t \\ v_{z,n} = v_{z,n-1} + a_{z,n-1}\Delta t \\ a_{x,n} = a_{x,n-1} \\ a_{y,n} = a_{y,n-1} \\ a_{z,n} = a_{z,n-1} \end{cases} \]
在卡尔曼滤波问题中,我们设定状态为 \(\boldsymbol{x}_n\) ,控制输入为 \(\boldsymbol{u}_n\) (可选),假设系统满足以下包含高斯白噪声的线性模型:
\[ \begin{cases} \boldsymbol{x}_n &=\boldsymbol{F}\boldsymbol{x}_{n-1}+\boldsymbol{G}\boldsymbol{u}_{n-1}+\boldsymbol{\omega}_{n-1} ,\quad &\boldsymbol{w}_{n-1}\sim\mathcal{N}(\boldsymbol{0},\boldsymbol{Q}_{n-1}) \\ \boldsymbol{z}_n &= \boldsymbol{H}\boldsymbol{x}_n+\boldsymbol{v}_n ,\quad &\boldsymbol{v}_{n}\sim\mathcal{N}(\boldsymbol{0},\boldsymbol{R}_{n}) \end{cases} \]
其中系统过程噪声 \(\boldsymbol{w}\) 和测量噪声 \(\boldsymbol{v}\) 均为高斯白噪声。
系统状态的真实值 \(\boldsymbol{x}\) 是一个确定值,但是我们无法得知真实值,而是对状态给出一个估计值 \(\hat{\boldsymbol{x}}\) (在已知观测数据时的后验估计),估计值和真实值之间的差异我们用高斯噪声描述估计值的不确定度,用协方差矩阵 \(\boldsymbol{P}\) 表示。我们可以认为估计值是真实值叠加噪声后的数据,具有一定的不确定度,但是在数学上我们更习惯反过来(将高斯噪声移到等号另一边仍为高斯噪声),将真实值描述为围绕估计值波动的随机变量,以描述我们的对真实值的未知性。因此,在 \(n\) 时刻,系统状态的估计为 \(\boldsymbol{x}_n\sim\mathcal{N}\left(\hat{\boldsymbol{x}}_{n|n},\boldsymbol{P}_{n|n}\right)\) .
状态外插方程 状态外插方程,用矩阵形式描述为:
\[ \hat{\boldsymbol{x}}_{n+1|n}=\boldsymbol{F}\hat{\boldsymbol{x}}_{n|n}+\boldsymbol{G}\boldsymbol{u}_n+\boldsymbol{\omega}_n \]
其中:
\(\hat{\boldsymbol{x}}_{n+1|n}:n_x\times 1\) 为 \(n\) 时刻对 \(n+1\) 时刻系统状态的预测。\(\hat{\boldsymbol{x}}_{n|n}\) 为 \(n\) 时刻对系统状态变量的估计。\(\boldsymbol{u}_n:n_u\times 1\) 为控制向量或输入向量,是系统的一个可测量的、确定性的输入。\(\boldsymbol{\omega}_n:n_x\times 1\) 为过程噪声,是影响系统状态的、不可测量的输入。\(\boldsymbol{F}:n_x\times n_x\) 为状态转移矩阵。\(\boldsymbol{G}:n_x\times n_u\) 为控制矩阵或输入转移矩阵,将控制量映射到状态变量上。 匀加速运动的飞机模型 考虑一个匀加速运动的飞机,飞行员的操纵杆上有一个传感器,可以读取加速度操纵指令。状态向量设为位置和速度:
\[ \hat{\boldsymbol{x}}_n=\begin{pmatrix} \hat x_n \\ \hat y_n \\ \hat z_n \\ \hat v_{x,n} \\ \hat v_{y,n} \\ \hat v_{z,n} \end{pmatrix} \]
测量飞机加速度的控制向量为(注意控制变量不带 hat):
\[ \boldsymbol{u}_n=\begin{pmatrix} a_{x,n} \\ a_{y,n} \\ a_{z,n} \end{pmatrix} \]
状态转移矩阵为:
\[ \boldsymbol{F}=\begin{pmatrix} 1 & 0 & 0 & \Delta t & 0 & 0 \\ 0 & 1 & 0 & 0 & \Delta t & 0 \\ 0 & 0 & 1 & 0 & 0 & \Delta t \\ 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 \end{pmatrix} \]
控制矩阵为:
\[ \boldsymbol{G}=\begin{pmatrix} 0.5\Delta t^2 & 0 & 0 \\ 0 & 0.5\Delta t^2 & 0 \\ 0 & 0 & 0.5\Delta t^2 \\ \Delta t & 0 & 0 \\ 0 & \Delta t & 0 \\ 0 & 0 & \Delta t \end{pmatrix} \]
状态外插方程为 \(\hat{\boldsymbol{x}}_{n+1|n} = \boldsymbol{F}\hat{\boldsymbol{x}}_{n|n} + \boldsymbol{G}\boldsymbol{u}_{n|n}\) :
\[ \begin{pmatrix} \hat x_{n+1|n} \\ \hat y_{n+1|n} \\ \hat z_{n+1|n} \\ \hat v_{x,n+1|n} \\ \hat v_{y,n+1|n} \\ \hat v_{z,n+1|n} \end{pmatrix}= \begin{pmatrix} 1 & 0 & 0 & \Delta t & 0 & 0 \\ 0 & 1 & 0 & 0 & \Delta t & 0 \\ 0 & 0 & 1 & 0 & 0 & \Delta t \\ 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} \hat x_{n|n} \\ \hat y_{n|n} \\ \hat z_{n|n} \\ \hat v_{x,n|n} \\ \hat v_{y,n|n} \\ \hat v_{z,n|n} \end{pmatrix}+ \begin{pmatrix} 0.5\Delta t^2 & 0 & 0 \\ 0 & 0.5\Delta t^2 & 0 \\ 0 & 0 & 0.5\Delta t^2 \\ \Delta t & 0 & 0 \\ 0 & \Delta t & 0 \\ 0 & 0 & \Delta t \end{pmatrix} \begin{pmatrix} a_{x,n} \\ a_{y,n} \\ a_{z,n} \end{pmatrix} \]
状态外插方程的推导需要使用到线性系统的状态空间:
\[ \begin{align*} \dot{\boldsymbol{x}}(t)&=\boldsymbol{Ax}(t)+\boldsymbol{Bu}(t) \\ \boldsymbol{y}(t)&=\boldsymbol{Cx}(t)+\boldsymbol{Du}(t) \end{align*} \]
求解微分方程,得到:
\[ \boldsymbol{x}(t+\Delta t)=\mathrm{e}^{\boldsymbol{A}\Delta t}\boldsymbol{x}(t)+\int_0^{\Delta t}\mathrm{e}^{\boldsymbol{A}\Delta t}\ \mathrm{d}t\boldsymbol{B} \boldsymbol{u}(t) \]
由此得到:
\[ \boldsymbol{F}=\mathrm{e}^{\boldsymbol{A}\Delta t},\quad \boldsymbol{G}=\boldsymbol{B}\int_0^{\Delta t}\mathrm{e}^{\boldsymbol{A}\Delta t}\ \mathrm{d}t \]
协方差外插方程 先给出协方差外插方程的一般形式:
\[ \boldsymbol{P}_{n+1|n}=\boldsymbol{F}\boldsymbol{P}_{n|n}\boldsymbol{F}^T+\boldsymbol{Q} \]
其中:
\(\boldsymbol{P}_{n+1|n}\) 为下一个状态预测时的协方差矩阵。\(\boldsymbol{P}_{n|n}\) 为当前状态估计的协方差矩阵。有 \(\boldsymbol{P}_{n|n}=\mathbb{E}(\boldsymbol{e}_n\boldsymbol{e}_n^T)=\mathbb{E}\left((\boldsymbol{x}_n-\hat{\boldsymbol{x}}_{n|n})(\boldsymbol{x}_n-\hat{\boldsymbol{x}}_{n|n})^T\right)\) .\(\boldsymbol{F}\) 为状态转移矩阵。\(\boldsymbol{Q}\) 为过程噪声协方差矩阵。有 \(\boldsymbol{Q}_n=\mathbb{E}(\boldsymbol{\omega}\boldsymbol{\omega}_n^T)\) . 简单的推导过程如下:
当不考虑过程噪声的时候, \(\boldsymbol{Q}=0\) . 根据协方差的定义:
\[ \boldsymbol{P}_{n|n} = \mathbb{E} \left( \left( \hat{\boldsymbol{x}}_{n|n} - \boldsymbol{\mu}_{x_{n|n}} \right) \left( \hat{\boldsymbol{x}}_{n|n} - \boldsymbol{\mu}_{x_{n|n}} \right)^T \right) \]
根据状态外插方程 \(\hat{\boldsymbol{x}}_{n+1|n} = \boldsymbol{F} \hat{\boldsymbol{x}}_{n|n} + \boldsymbol{G} \hat{\boldsymbol{u}}_{n|n}\) 得到:
\[ \begin{align*} \boldsymbol{P}_{n+1|n} &= \mathbb{E} \left\{ \left( \hat{\boldsymbol{x}}_{n+1|n} - \boldsymbol{\mu}_{x_{n+1|n}} \right) \left( \hat{\boldsymbol{x}}_{n+1|n} - \boldsymbol{\mu}_{x_{n+1|n}} \right)^T \right\} \\ &= \mathbb{E} \left\{ \left( \boldsymbol{F} \hat{\boldsymbol{x}}_{n|n} + \boldsymbol{G} \hat{\boldsymbol{u}}_{n|n} - \boldsymbol{F} \boldsymbol{\mu}_{x_{n|n}} - \boldsymbol{G} \boldsymbol{\mu}_{u_{n|n}} \right) \left( \boldsymbol{F} \hat{\boldsymbol{x}}_{n|n} + \boldsymbol{G} \hat{\boldsymbol{u}}_{n|n} - \boldsymbol{F} \boldsymbol{\mu}_{x_{n|n}} - \boldsymbol{G} \boldsymbol{\mu}_{u_{n|n}} \right)^T \right\} \\ &= \mathbb{E} \left\{ \boldsymbol{F} \left( \hat{\boldsymbol{x}}_{n|n} - \boldsymbol{\mu}_{x_{n|n}} \right) \left( \boldsymbol{F} \left( \hat{\boldsymbol{x}}_{n|n} - \boldsymbol{\mu}_{x_{n|n}} \right) \right)^T \right\} \\ &= \mathbb{E} \left\{ \boldsymbol{F} \left( \hat{\boldsymbol{x}}_{n|n} - \boldsymbol{\mu}_{x_{n|n}} \right) \left( \hat{\boldsymbol{x}}_{n|n} - \boldsymbol{\mu}_{x_{n|n}} \right)^T \boldsymbol{F}^T \right\} \\ &= \boldsymbol{F} \mathbb{E} \left\{ \left( \hat{\boldsymbol{x}}_{n|n} - \boldsymbol{\mu}_{x_{n|n}} \right) \left( \hat{\boldsymbol{x}}_{n|n} - \boldsymbol{\mu}_{x_{n,n}} \right)^T \right\} \boldsymbol{F}^T \\ &= \boldsymbol{F} \boldsymbol{P}_{n|n} \boldsymbol{F}^T \end{align*} \]
然后再添加上过程噪声 \(\boldsymbol{Q}\) 即可得到:
\[ \boldsymbol{P}_{n+1|n}=\boldsymbol{F}\boldsymbol{P}_{n|n}\boldsymbol{F}^T+\boldsymbol{Q} \]
测量方程 测量值 \(z_n\) 代表系统的真实状态值和由测量设备引入的随机观测噪声 \(v_n\) 的叠加。
测量方程为:
\[ \boldsymbol{z}_n=\boldsymbol{H}\boldsymbol{x}_n+\boldsymbol{v}_n \]
其中:
\(\boldsymbol{z}_n:n_z\times 1\) 为测量向量。\(\boldsymbol{x}_n\) 为系统真实状态,是隐藏的、未知的。\(\boldsymbol{v}_n:n_z\times 1\) 为测量的随机噪声向量。测量的协方差矩阵为 \(\boldsymbol{R}_n=\mathbb{E}(\boldsymbol{v}_n\boldsymbol{v}_n^T)\) .\(\boldsymbol{H}:n_z\times n_x\) 为观测矩阵 。以线性变换的形式,将系统状态变换到测量的输出。这是因为实际中我们的测量设备不是直接获取系统的状态,而是间接的,例如一个电子秤,系统状态是质量,但是仪器本身测量的是电流。 状态更新方程 矩阵形式的状态更新方程:
\[ \hat{\boldsymbol{x}}_{n|n}=\hat{\boldsymbol{x}}_{n|n-1}+\boldsymbol{K}_n(\boldsymbol{z}_n-\boldsymbol{H}\hat{\boldsymbol{x}}_{n|n-1}) \]
其中:
\(\hat{\boldsymbol{x}}_{n|n}\) 为 \(n\) 时刻对系统的状态估计。\(\hat{\boldsymbol{x}}_{n|n-1}\) 为在 \(n-1\) 时刻对 \(n\) 时刻系统的状态估计。\(\boldsymbol{K}_n:n_x\times n_z\) 为卡尔曼增益。 Example 假如状态向量是5维的,并且其中只有3个维度是可观测的(第1、3、5个状态):
\[ \boldsymbol{x}_n = \begin{pmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \\ x_5 \end{pmatrix}, \quad \boldsymbol{z}_n = \begin{pmatrix} z_1 \\ z_3 \\ z_5 \end{pmatrix} \]
那么观测矩阵应该是一个 \(3 \times 5\) 的矩阵:
\[ \boldsymbol{H} = \begin{pmatrix} 1 & 0 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 \end{pmatrix} \]
更新量 \((\boldsymbol{z}_n - \boldsymbol{H} \hat{\boldsymbol{x}}_{n,n-1})\) 为:
\[ (\boldsymbol{z}_n - \boldsymbol{H} \hat{\boldsymbol{x}}_{n,n-1}) = \begin{pmatrix} z_1 \\ z_3 \\ z_5 \end{pmatrix} - \begin{pmatrix} 1 & 0 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} \hat{x}_1 \\ \hat{x}_2 \\ \hat{x}_3 \\ \hat{x}_4 \\ \hat{x}_5 \end{pmatrix} = \begin{pmatrix} z_1 - \hat{x}_1 \\ z_3 - \hat{x}_3 \\ z_5 - \hat{x}_5 \end{pmatrix} \]
那么卡尔曼增益 \(\boldsymbol{K}_n\) 的维度应该是 \(5 \times 3\) 。
协方差更新方程 矩阵形式的协方差更新方程为:
\[ \boldsymbol{P}_{n|n}=(\boldsymbol{I}-\boldsymbol{K}_n\boldsymbol{H})\boldsymbol{P}_{n|n-1}(\boldsymbol{I}-\boldsymbol{K}_n\boldsymbol{H})^T+\boldsymbol{K}_n\boldsymbol{R}_n\boldsymbol{K}_n^T \]
其中:
\(\boldsymbol{P}_{n|n}\) 为当前 \(n\) 时刻状态估计的协方差矩阵。\(\boldsymbol{P}_{n|n-1}\) 为前一时刻 \(n-1\) 时刻对当前 \(n\) 时刻状态预测的协方差矩阵。\(\boldsymbol{R}_n=\mathbb{E}(\boldsymbol{v}_n\boldsymbol{v}_n^T)\) 为测量噪声的协方差矩阵。\(\boldsymbol{I}\) 为维度 \(n_x\times n_x\) 的单位阵。 如下是一个简单的推导过程。我们将下面四个方程作为已知条件:
\[ \begin{align*} \hat{\boldsymbol{x}}_{n|n} &= \hat{\boldsymbol{x}}_{n|n-1} + \boldsymbol{K}_n (\boldsymbol{z}_n - \boldsymbol{H} \hat{\boldsymbol{x}}_{n|n-1}) &\quad\text{状态更新方程} \\ \boldsymbol{z}_n &= \boldsymbol{H} \boldsymbol{x}_n + \boldsymbol{v}_n &\quad\text{测量方程} \\ \boldsymbol{P}_{n|n} &= \mathbb{E} \left( \boldsymbol{e}_n \boldsymbol{e}_n^T \right) = \mathbb{E} \left\{ \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n,n} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n} \right)^T \right\} &\quad\text{估计协方差} \\ \boldsymbol{R}_n &= \mathbb{E} \left( \boldsymbol{v}_n \boldsymbol{v}_n^T \right) &\quad\text{测量协方差} \end{align*} \]
首先我们改写状态更新方程:
\[ \begin{align*} \hat{\boldsymbol{x}}_{n|n} &= \hat{\boldsymbol{x}}_{n|n-1} + \boldsymbol{K}_n (\boldsymbol{z}_n - \boldsymbol{H} \hat{\boldsymbol{x}}_{n|n-1}) \\ &= \hat{\boldsymbol{x}}_{n|n-1} + \boldsymbol{K}_n (\boldsymbol{H} \boldsymbol{x}_n + \boldsymbol{v}_n - \boldsymbol{H} \hat{\boldsymbol{x}}_{n|n-1}) \end{align*} \]
然后计算测量误差:
\[ \begin{align*} \boldsymbol{e}_n &= \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n} \\ &= \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} - \boldsymbol{K}_n (\boldsymbol{H} \boldsymbol{x}_n + \boldsymbol{v}_n - \boldsymbol{H} \hat{\boldsymbol{x}}_{n|n-1}) \\ &= \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} - \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{x}_n - \boldsymbol{K}_n \boldsymbol{v}_n + \boldsymbol{K}_n \boldsymbol{H} \hat{\boldsymbol{x}}_{n|n-1} \\ &= \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n,n-1} - \boldsymbol{K}_n \boldsymbol{H} (\boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1}) - \boldsymbol{K}_n \boldsymbol{v}_n \\ &= (\boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H}) (\boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n,n-1}) - \boldsymbol{K}_n \boldsymbol{v}_n \end{align*} \]
再求 \(\boldsymbol{P}_{n|n}\) :
\[ \begin{align*} \boldsymbol{P}_{n,n} &= \mathbb{E} \left( \boldsymbol{e}_n \boldsymbol{e}_n^T \right) = \mathbb{E} \left\{ \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n} \right)^T \right\} \\ &= \mathbb{E} \left\{ \left[ \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) - \boldsymbol{K}_n \boldsymbol{v}_n \right] \times \left[ \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n,n-1} \right) - \boldsymbol{K}_n \boldsymbol{v}_n \right]^T \right\} \\ &= \mathbb{E} \left\{ \left[ \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) - \boldsymbol{K}_n \boldsymbol{v}_n \right] \times \left[ \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right)^T \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T - \left( \boldsymbol{K}_n \boldsymbol{v}_n \right)^T \right] \right\} \\ &= \mathbb{E} \left\{ \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right)^T \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T - \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) \left( \boldsymbol{K}_n \boldsymbol{v}_n \right)^T - \boldsymbol{K}_n \boldsymbol{v}_n \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right)^T \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T + \boldsymbol{K}_n \boldsymbol{v}_n \left( \boldsymbol{K}_n \boldsymbol{v}_n \right)^T \right\} \\ &=\mathbb{E} \left\{ \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right)^T \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T \right\}- \mathbb{E}\left\{ \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) \left( \boldsymbol{K}_n \boldsymbol{v}_n \right)^T \right\} \\ &\quad - \mathbb{E}\left\{\boldsymbol{K}_n \boldsymbol{v}_n \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right)^T \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T \right\} + \mathbb{E}\left\{\boldsymbol{K}_n \boldsymbol{v}_n \left( \boldsymbol{K}_n \boldsymbol{v}_n \right)^T \right\} \end{align*} \]
上式展开后有4项,观察中间2项,由于 \(\boldsymbol{x}_n-\hat{\boldsymbol{x}}_{n|n}\) 是先验估计的误差,它和当前时刻的测量噪声 \(\boldsymbol{v}_n\) 无关,两个不相关的随机变量的积的期望是0:
\[ \begin{align*} \mathbb{E}\left\{ \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) \left( \boldsymbol{K}_n \boldsymbol{v}_n \right)^T \right\} =0 \\ \mathbb{E}\left\{\boldsymbol{K}_n \boldsymbol{v}_n \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right)^T \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T \right\} =0 \end{align*} \]
上式化简为:
\[ \begin{align*} \boldsymbol{P}_{n|n}&= \mathbb{E} \left\{ \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right)^T \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T \right\} + \mathbb{E} \left( \boldsymbol{K}_n \boldsymbol{v}_n \boldsymbol{v}_n^T \boldsymbol{K}_n^T \right) \\ &= \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \mathbb{E} \left\{ \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right) \left( \boldsymbol{x}_n - \hat{\boldsymbol{x}}_{n|n-1} \right)^T \right\} \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T + \boldsymbol{K}_n \mathbb{E} \left( \boldsymbol{v}_n \boldsymbol{v}_n^T \right) \boldsymbol{K}_n^T \\ &=(\boldsymbol{I}-\boldsymbol{K}_n\boldsymbol{H})\boldsymbol{P}_{n|n-1}(\boldsymbol{I}-\boldsymbol{K}_n\boldsymbol{H})^T+\boldsymbol{K}_n\boldsymbol{R}_n\boldsymbol{K}_n^T \end{align*} \]
卡尔曼增益 矩阵形式的卡尔曼增益公式为:
\[ \boldsymbol{K}_n=\boldsymbol{P}_{n|n-1}\boldsymbol{H}^T \left( \boldsymbol{H}\boldsymbol{P}_{n|n-1}\boldsymbol{H}^T + \boldsymbol{R}_n\right)^{-1} \]
推导过程:重写协方差更新方程:
\[ \begin{align*} \boldsymbol{P}_{n|n} &= \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \boldsymbol{P}_{n|n-1} \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right)^T + \boldsymbol{K}_n \boldsymbol{R}_n \boldsymbol{K}_n^T \\ &= \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \boldsymbol{P}_{n|n-1} \left[ \boldsymbol{I} - \left( \boldsymbol{K}_n \boldsymbol{H} \right)^T \right] + \boldsymbol{K}_n \boldsymbol{R}_n \boldsymbol{K}_n^T \\ &= \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \boldsymbol{P}_{n,n-1} \left( \boldsymbol{I} - \boldsymbol{H}^T \boldsymbol{K}_n^T \right) + \boldsymbol{K}_n \boldsymbol{R}_n \boldsymbol{K}_n^T \\ &= \left( \boldsymbol{P}_{n|n-1} - \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{P}_{n|n-1} \right) \left( \boldsymbol{I} - \boldsymbol{H}^T \boldsymbol{K}_n^T \right) + \boldsymbol{K}_n \boldsymbol{R}_n \boldsymbol{K}_n^T \\ &= \boldsymbol{P}_{n|n-1} - \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T \boldsymbol{K}_n^T - \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{P}_{n|n-1} + \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T \boldsymbol{K}_n^T + \boldsymbol{K}_n \boldsymbol{R}_n \boldsymbol{K}_n^T \\ &= \boldsymbol{P}_{n|n-1} - \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T \boldsymbol{K}_n^T - \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{P}_{n|n-1} + \boldsymbol{K}_n \left( \boldsymbol{H} \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T + \boldsymbol{R}_n \right) \boldsymbol{K}_n^T \end{align*} \]
我们令 \(\boldsymbol{S}_n=\boldsymbol{H} \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T + \boldsymbol{R}_n\) ,由于卡尔曼增益需要满足最小化估计值的方差,也就是协方差矩阵的主对角线上的值。我们选择的评判标准是“误差均方和”,也就是协方差矩阵的迹 \(\operatorname{tr}(\boldsymbol{P}_{n|n})\) . 利用恒等式 \(\operatorname{tr}(AB)=\operatorname{tr}(BA)\) ,我们有:
\[ \operatorname{tr}(\boldsymbol{P}_{n|n})=\operatorname{tr}(\boldsymbol{P}_{n|n-1})-2\operatorname{tr}(\boldsymbol{K}_n\boldsymbol{H}\boldsymbol{P}_{n|n-1})+\operatorname{tr}(\boldsymbol{K}_n\boldsymbol{S}_n\boldsymbol{K}_n^T) \]
需要最小化迹 \(\operatorname{tr}(\boldsymbol{P}_{n|n})\) ,将其对卡尔曼增益 \(\boldsymbol{K}_n\) 求导,利用公式: \(\dfrac{\partial}{\partial K}\operatorname{tr}(A^TK)=A,\;\dfrac{\partial}{\partial K}\operatorname{tr}(KSK^T)=K(S+S^T)\) ,而显然 \(\boldsymbol{S}_n=\boldsymbol{S}_n^T\) ,因此:
\[ \frac{\partial}{\partial \boldsymbol{K}_n}\operatorname{tr}(\boldsymbol{P}_{n|n}) =-2(\boldsymbol{H}\boldsymbol{P}_{n|n-1})^T+2\boldsymbol{K}_n\boldsymbol{S}_n=0 \implies \boldsymbol{K}_n\boldsymbol{S}_n=\boldsymbol{P}_{n|n-1}\boldsymbol{H}^T \]
由此可以得到卡尔曼增益方程:
\[ \boldsymbol{K}_n=\boldsymbol{P}_{n|n-1}\boldsymbol{H}^T (\boldsymbol{S}_n)^{-1}=\boldsymbol{P}_{n|n-1}\boldsymbol{H}^T \left( \boldsymbol{H}\boldsymbol{P}_{n|n-1}\boldsymbol{H}^T + \boldsymbol{R}_n\right)^{-1} \]
事实上这里需要一个条件: \(\boldsymbol{S}_n\) 是正定的,即 \(\boldsymbol{S}_n\succ 0\) ,这样可以推出 \(\boldsymbol{S}_n\) 可逆。另外, \(\boldsymbol{S}_n\) 正定的一个充分条件是 \(\boldsymbol{R}_n\) 正定。如果 \(\boldsymbol{R}_n\) 非正定,情况会比较复杂,这里不做讨论。
简化的协方差更新方程 我们可以推导出一个简化的协方差更新方程:
\[ \boldsymbol{P}_{n|n}=(\boldsymbol{I}-\boldsymbol{K}_n\boldsymbol{H})\boldsymbol{P}_{n|n-1} \]
推导过程如下,先将原始的协方差更新方程展开:
\[ \begin{align*} \boldsymbol{P}_{n|n} &= \boldsymbol{P}_{n|n-1} - \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T \boldsymbol{K}_n^T - \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{P}_{n|n-1} + \boldsymbol{K}_n \left( \boldsymbol{H} \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T + \boldsymbol{R}_n \right) \boldsymbol{K}_n^T \\ &= \boldsymbol{P}_{n|n-1} - \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T \boldsymbol{K}_n^T - \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{P}_{n|n-1} + \boldsymbol{P}_{n,n-1} \boldsymbol{H}^T \left( \boldsymbol{H} \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T + \boldsymbol{R}_n \right)^{-1} \left( \boldsymbol{H} \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T + \boldsymbol{R}_n \right) \boldsymbol{K}_n^T \\ &= \boldsymbol{P}_{n|n-1} - \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T \boldsymbol{K}_n^T - \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{P}_{n|n-1} + \boldsymbol{P}_{n|n-1} \boldsymbol{H}^T \boldsymbol{K}_n^T \\ &= \boldsymbol{P}_{n|n-1} - \boldsymbol{K}_n \boldsymbol{H} \boldsymbol{P}_{n|n-1} \\ &= \left( \boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H} \right) \boldsymbol{P}_{n|n-1} \end{align*} \]
Warning
这个方程看起来要精炼很多并且容易记忆,并且在许多情况下没什么问题。但是,在计算卡尔曼增益时的一个小误差(浮点截尾误差)可能给结果带来巨大的偏差, \((\boldsymbol{I} - \boldsymbol{K}_n \boldsymbol{H})\) 的差可能因为浮点计算误差而使其结果不再是对称阵,因此这个方程在数值计算上并不稳定 !
Summary
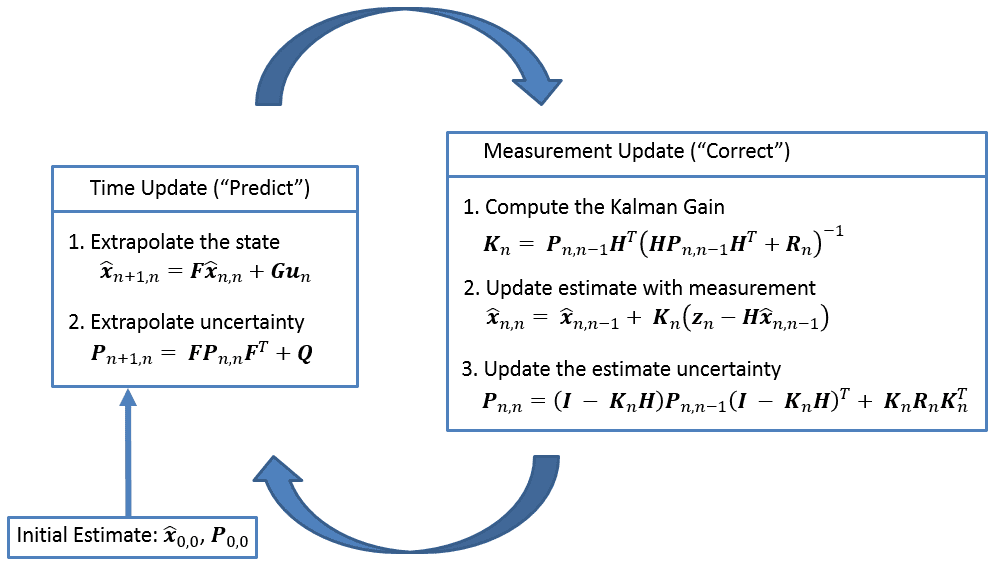
初始化:输入初始时刻状态估计 \(\hat{\boldsymbol{x}}_{0\mid 0}\) 和初始时刻协方差估计 \(\boldsymbol{P}_{0\mid 0}\) 预测阶段 状态外插/转移/预测: \(\hat{\boldsymbol{x}}_{n+1\mid n} = \boldsymbol{F}\hat{\boldsymbol{x}}_{n\mid n} + \boldsymbol{G}\boldsymbol{u}_n\) 协方差外插/预测: \(\boldsymbol{P}_{n+1\mid n} = \boldsymbol{F}\boldsymbol{P}_{n\mid n}\boldsymbol{F}^T + \boldsymbol{Q}_n\) 更新阶段,上一时刻的预测(先验) \(\hat{\boldsymbol{x}}_{n+1|n}\) 即为这一时刻的 \(\hat{\boldsymbol{x}}_{n|n-1}\) . 卡尔曼增益: \(\boldsymbol{K}_n = \boldsymbol{P}_{n\mid n-1}\boldsymbol{H}^T\left(\boldsymbol{H}\boldsymbol{P}_{n\mid n-1}\boldsymbol{H}^T + \boldsymbol{R}_n\right)^{-1}\) 状态更新: \(\hat{\boldsymbol{x}}_{n\mid n} = \hat{\boldsymbol{x}}_{n\mid n-1} + \boldsymbol{K}_n (\boldsymbol{z}_n - \boldsymbol{H}\hat{\boldsymbol{x}}_{n\mid n-1})\) 协方差更新(Joseph 形式): \(\boldsymbol{P}_{n\mid n} = (\boldsymbol{I}-\boldsymbol{K}_n \boldsymbol{H})\boldsymbol{P}_{n\mid n-1}(\boldsymbol{I}-\boldsymbol{K}_n \boldsymbol{H})^T+ \boldsymbol{K}_n\boldsymbol{R}_n\boldsymbol{K}_n^T\) 辅助方程 测量方程: \(\boldsymbol{z}_n = \boldsymbol{H}\boldsymbol{x}_n+\boldsymbol{v}_n\) 测量协方差: \(\boldsymbol{R}_n = \mathbb{E}\left(\boldsymbol{v}_n \boldsymbol{v}_n^T\right)\) 过程噪声协方差: \(\boldsymbol{Q}_n = \mathbb{E}\left(\boldsymbol{w}_n \boldsymbol{w}_n^T\right)\) 估计协方差: \(\boldsymbol{P}_{n\mid n} = \mathbb{E}\left(\boldsymbol{e}_n \boldsymbol{e}_n^T\right) = \mathbb{E}\left\{(\boldsymbol{x}_n-\hat{\boldsymbol{x}}_{n\mid n})(\boldsymbol{x}_n-\hat{\boldsymbol{x}}_{n\mid n})^T \right\}\) 数值计算实现时,求逆运算例如 \(\left(\boldsymbol{H}\boldsymbol{P}_{n\mid n-1}\boldsymbol{H}^T + \boldsymbol{R}_n\right)^{-1}\) 尽量不直接求逆,而是使用 Cholesky 分解更快更稳定,后面介绍的 EKF、IEKF、UKF 等也是如此。
在其他教科书或文献中,卡尔曼滤波中的预测值也写作 \(\hat{\boldsymbol{x}}_k^-,\;\boldsymbol{P}_k^-\) ,估计值也写作 \(\hat{\boldsymbol{x}}_{k},\;\boldsymbol{P}_k\) .
符号汇总: \(n_x\) 为状态向量中状态的个数, \(n_z\) 为测量到的状态数, \(n_u\) 为输入向量中元素个数。
Name Symbol Dimension 状态向量 \(\boldsymbol{x}\) \(n_x \times 1\) 输出向量 \(\boldsymbol{z}\) \(n_z \times 1\) 状态转移矩阵 \(\boldsymbol{F}\) \(n_x \times n_x\) 输入向量 \(\boldsymbol{u}\) \(n_u \times 1\) 控制矩阵 \(\boldsymbol{G}\) \(n_x \times n_u\) 估计协方差 \(\boldsymbol{P}\) \(n_x \times n_x\) 过程噪声协方差 \(\boldsymbol{Q}\) \(n_x \times n_x\) 测量协方差 \(\boldsymbol{R}\) \(n_z \times n_z\) 过程噪声向量 \(\boldsymbol{w}\) \(n_x \times 1\) 测量噪声向量 \(\boldsymbol{v}\) \(n_z \times 1\) 观测矩阵 \(\boldsymbol{H}\) \(n_z \times n_x\) 卡尔曼增益 \(\boldsymbol{K}\) \(n_x \times n_z\)
Code 下面给出一个线性卡尔曼滤波的 Python 实现:
Python from dataclasses import dataclass
import numpy as np
from scipy.linalg import cho_factor , cho_solve
@dataclass
class LinearGaussianModel :
"""A linear Gaussian state-space model for Kalman filtering."""
state_transition : np . ndarray # F
observation : np . ndarray # H
process_noise_cov : np . ndarray # Q
measure_noise_cov : np . ndarray # R
control_input : np . ndarray | None = None # B
class KalmanFilter :
"""A Kalman filter for linear Gaussian state-space models."""
def __init__ (
self ,
model : LinearGaussianModel ,
init_state_mean : np . ndarray ,
init_state_cov : np . ndarray ,
) -> None :
"""Initialize the Kalman filter with the given model and initial state.
Args:
model (LinearGaussianModel): The linear Gaussian model.
init_state_mean (np.ndarray): Initial state mean.
init_state_cov (np.ndarray): Initial state covariance.
"""
self . model = model
self . state_mean = init_state_mean . copy ()
self . state_cov = init_state_cov . copy ()
def predict (
self , control_vector : np . ndarray | None = None
) -> tuple [ np . ndarray , np . ndarray ]:
"""Perform the prediction step of the Kalman filter.
Args:
control_vector (np.ndarray | None, optional): Control vector. Defaults to None.
Returns:
tuple[np.ndarray, np.ndarray]: Predicted state mean and covariance.
"""
F = self . model . state_transition
Q = self . model . process_noise_cov
B = self . model . control_input
# Predict the next state mean.
if B is not None and control_vector is not None :
self . state_mean = F @ self . state_mean + B @ control_vector
else :
self . state_mean = F @ self . state_mean
# Predict the next state covariance.
self . state_cov = F @ self . state_cov @ F . T + Q
return self . state_mean , self . state_cov
def project ( self ) -> tuple [ np . ndarray , np . ndarray ]:
"""Project the current state into the observation space.
Returns:
tuple[np.ndarray, np.ndarray]: Projected mean and covariance.
"""
H = self . model . observation
R = self . model . measure_noise_cov
# Projected mean and covariance in observation space.
projected_mean = H @ self . state_mean
projected_cov = H @ self . state_cov @ H . T + R
return projected_mean , projected_cov
def update ( self , measurement : np . ndarray ) -> tuple [ np . ndarray , np . ndarray ]:
"""Perform the update step of the Kalman filter with the given measurement.
Args:
measurement (np.ndarray): Measurement vector.
Returns:
tuple[np.ndarray, np.ndarray]: Updated state mean and covariance.
"""
H = self . model . observation
R = self . model . measure_noise_cov
# Compute the Kalman gain.
# Use Cholesky decomposition for matrix inversion.
S = H @ self . state_cov @ H . T + R
K = cho_solve (
cho_factor (
S ,
lower = True ,
overwrite_a = True ,
check_finite = False ,
),
H @ self . state_cov . T ,
overwrite_b = True ,
check_finite = False ,
) . T
# Update the state mean and covariance.
self . state_mean = self . state_mean + K @ ( measurement - H @ self . state_mean )
I_n = np . eye ( self . state_cov . shape [ 0 ])
self . state_cov = ( I_n - K @ H ) @ self . state_cov @ ( I_n - K @ H ) . T + K @ R @ K . T
return self . state_mean , self . state_cov
Appendix 卡尔曼滤波估计的目标是最小均方误差(Minimum Mean Square Error, MMSE)。在线性高斯模型 (状态转移、观测都是线性的,先验分布和噪声均为高斯分布)的假设下,MMSE 可以等价于最大后验估计(Maximum A Posteriori, MAP),也就是说,卡尔曼滤波给出的估计既是最小均方误差解,也是最大后验解。下面来简单解释一下。
MMSE 估计:给定观测 \(z\) 后,选择一个估计 \(\hat{x}\) 最小化条件期望的二次误差:
\[ \hat{x}_{\text{MMSE}}=\arg\min_a\mathbb{E}(\|x-a\|^2\mid z) \]
对任意分布,最小化平方损失的最佳点就是条件均值,因此:
\[ \hat{x}_{\text{MMSE}}=\mathbb{E}(x\mid z) \]
MAP 估计:给定观测 \(z\) 后,选择使后验概率密度最大的点(后验众数):
\[ \hat{x}_{\text{MAP}}=\arg\max_x p(x\mid z)=\arg\min_x (-\log p(x\mid z)) \]
若后验为高斯分布,概率密度最大值即为均值处,因此 \(\hat{x}_{\text{MAP}}=\mu\) .
因此,当后验分布为高斯分布,有 \(\hat{x}_{\text{MMSE}}=\hat{x}_{\text{MAP}}\) .
对于单次观测,考虑最简单的的情形:先验分布为高斯分布 \(x\sim\mathcal{N}(m,P)\) ,线性观测模型包含高斯噪声 \(z=Hx+v,\;v\sim\mathcal{N}(0,R)\) .
由 Bayes 定理,后验概率 \(p(x\mid z)\propto p(z\mid x)\;p(x)\) ,写出他的概率分布:
\[ -\log p(x\mid z)=\frac{1}{2}(x-m)^TP^{-1}(x-m)+\frac{1}{2}(z-Hx)^TR^{-1}(z-Hx)+C \]
这是关于 \(x\) 的一个严格凸的二次型,配方可得后验分布仍是高斯分布 \(x\mid z\sim\mathcal{N}(\mu,\Sigma)\) ,其中:
\[ \Sigma=(P^{-1}+H^TR^{-1}H)^{-1},\quad \mu=\Sigma(P^{-1}m+H^TR^{-1}z) \]
因此,MMSE 等价于 MAP,解即为条件均值 \(\mu\) .
同时,上式也等价于带先验约束的最小二乘问题:
\[ \min_x \|x-m\|^2_{P^{-1}}+\|z-Hx\|^2_{R^{-1}} \]
随着时间递推:
\[ \begin{align*} x_k &= F_{k-1}x_{k-1} + w_{k-1}, \quad w_{k-1} \sim \mathcal{N}(0, Q_{k-1}) \\ z_k &= H_k x_k + v_k, \quad v_k \sim \mathcal{N}(0, R_k) \end{align*} \]
若初始 \(x_0 \sim \mathcal{N}(m_0, P_0)\) ,则在每一步预测:
\[ \begin{align*} m_{k|k-1} &= F_{k-1} m_{k-1|k-1} \\ P_{k|k-1} &= F_{k-1} P_{k-1|k-1} F_{k-1}^T + Q_{k-1} \end{align*} \]
更新:
\[ \begin{align*} S_k &= H_k P_{k|k-1} H_k^T + R_k \\ K_k &= P_{k|k-1} H_k^T S_k^{-1} \\ m_{k|k} &= m_{k|k-1} + K_k (z_k - H_k m_{k|k-1}) \\ P_{k|k} &= (I - K_k H_k) P_{k|k-1} \end{align*} \]
用贝叶斯链式法则可以证明,在线性-高斯闭包下, \(p(x_k \mid z_{1:k})\) 始终是高斯分布 \(\mathcal{N}(m_{k|k}, P_{k|k})\) ,因此 MMSE 和 MAP 等价。
2025-11-12 16:18:09 2025-03-10 23:19:12