ByteTrack¶
[ECCV 2022] ByteTrack: Multi-Object Tracking by Associating Every Detection Box
arXiv: https://arxiv.org/abs/2110.06864
Springer: https://rd.springer.com/chapter/10.1007/978-3-031-20047-2_1
Code: https://github.com/FoundationVision/ByteTrack
Translation: https://zhuanlan.zhihu.com/p/645645269
大多数的 MOT 算法,只关心置信度(分数)大于阈值的检测框来获取 ID,置信度较低的目标(例如被遮挡的)被丢弃,可能造成真值目标丢失或轨迹碎片化。本文提出,通过关联几乎每个检测框进行跟踪,对于低置信度目标,利用它和轨迹的相似度来恢复真值目标、过滤对背景的检测。
清除所有低置信度检测框的做法正确吗?本文答案是否定的。正如黑格尔所说,“存在即合理”。低置信度检测框有时表明目标是存在的,例如被遮挡的目标。
如果一个目标在跟踪过程中发生短暂遮挡,它的边界框置信度会发生短暂下降。但是通过降低置信度阈值并不能解决这个问题,因为仅仅降低置信度阈值又会导致非目标被错误地“框出来”,也就是 false positives。
BYTE¶
主流方法都专注于设计更好的数据关联方式。然而本文认为检测框的使用方式决定了数据关联的上限,并且专注于在匹配过程中充分利用从高分到低分的检测框,不放弃低分检测框,可提高召回率。
几乎保留所有检测的边界框,分为高分和低分两类。首先将高分检测框与现有轨迹做关联匹配。发生遮挡、运动模糊或者尺寸改变时,某些轨迹可能找不到对应的匹配。
将低分检测框与剩余未匹配的轨迹做匹配。如果低分检测框中有真实目标,则匹配到对应的轨迹,如果没有真实目标,则因为未匹配到轨迹而丢弃。这样就能恢复低分检测框中的目标,同时过滤掉背景。
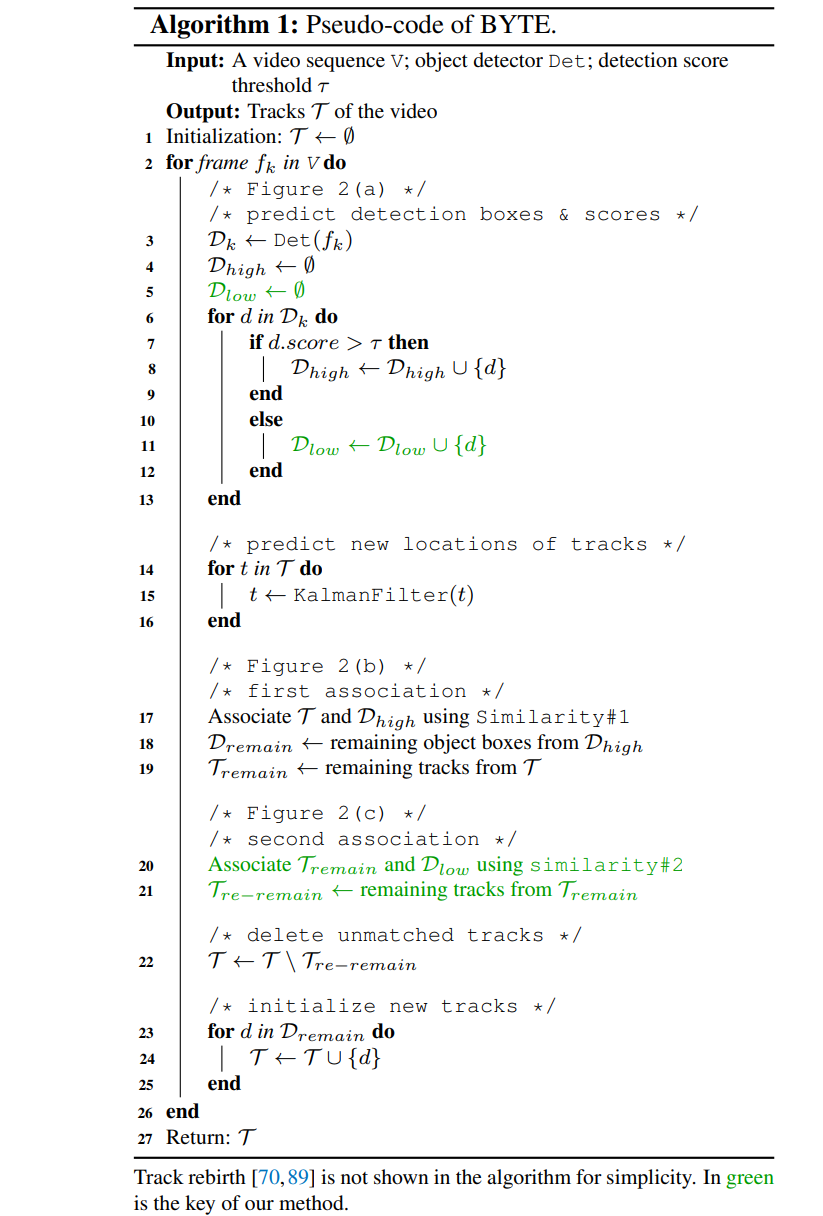
算法框架为:
- 检测框分组:按置信度阈值 \(\tau\) 将检测框分为高分组 \(\mathcal{D}_{high}\) 和低分组 \(\mathcal{D}_{low}\) .
- 轨迹预测:对每一条轨迹使用卡尔曼滤波预测,得到当前帧的预测框位置。
- Fisrt Association:对轨迹集合 \(\mathcal{T}\) 和高分组检测框 \(\mathcal{D}_{high}\) 做匈牙利算法最优匹配,相似度使用 IoU 距离或者 IoU + ReID。未匹配的轨迹记为 \(\mathcal{T}_{remain}\) ,未匹配的检测框记为 \(\mathcal{D}_{remain}\) .
- Second Association:对 \(\mathcal{T}_{remain}\) 和 \(\mathcal{D}_{low}\) 做最优匹配,仅使用 IoU 距离计算代价(因为低置信度框通常外观特征不可靠)。仍未匹配的轨迹记为 \(\mathcal{T}_{re-remain}\) .
- 删除长期未匹配的轨迹 \(\mathcal{T}\gets \mathcal{T}\backslash\mathcal{T}_{re-remain}\) ,然后建立新的轨迹 \(\mathcal{T}\gets \mathcal{T}\cup \mathcal{D}_{remain}\) .
- 为了保留可能临时丢失的目标,将 \(\mathcal{T}_{re-remain}\) 中的轨迹放入 \(\mathcal{T}_{lost}\) ,而 \(\mathcal{T}_{lost}\) 中的每个轨迹存留 30 帧以上才删除它。
- 每一帧的输出是 \(\mathcal{T}\) 中轨迹的边界框和 ID。
基于 BYTE 设计出跟踪器:ByteTrack = YOLOX(detector) + BYTE(association)
Bounding Box Annotations¶
MOT17 数据集中,每个人的边界框覆盖了整个身体,即使他被遮挡或者有部分到了图像之外(边界框也会延伸到图像之外)。但是 YOLOX 默认会把边界框裁剪到图像之内,为避免检测出错,本文修改了 YOLOX 的数据预处理和标签分配策略:
- 在预处理和数据增强阶段,不在裁剪超出图像的检测框,只删除完全在图像之外的检测框。
- MOT17 数据集标注中,人的中心点可能在图像之外。YOLOX 的标签分配策略 SimOTA 要求正样本围绕目标中心分布,因此在分配正样本时可能因为中心点超出图像而失效。这种情况下,只把中心点裁到图像内,不裁剪边界框。
MOT20、HiEve 和 BDD100K 数据集的标注,已经将标注的边界框裁剪到图像内,因此无需改动 YOLOX。
Tracklet Interpolation¶
MOT17 数据集中,有一些被完全遮挡的行人,YOLOX 无法输出他们的检测框。如果某个目标在被检测到的两帧之间被遮挡,可以使用线性插值“找回”中间的几帧。
假设某轨迹 \(T\) 在第 \(t_1\) 帧的检测框为 \(B_{t1}\) ,第 \(t_2\) 帧的检测框为 \(B_{t2}\) ,插入中间帧:
其中检测框 \(B_t=[x_{tl},y_{tl},x_{br},y_{br}]\in\mathbb{R}^4\) 代表左上和右下坐标,同时还应该限制遮挡时间不超过最大间隔才进行插值补帧 \(t_2-t_1<\sigma\) .