Week 12 Assignment¶
题目要求:
- 使用平滑函数 \(h(x)=\exp(\sqrt{x^2+y^2}/120)\) (尺寸7×7)与 DIP 图卷积产生模糊,然后用逆滤波实现对有模糊图像的恢复。
- 在模糊图像上叠加高斯噪声(均值0,方差8、16、24),对比逆滤波与维纳滤波对图像的恢复效果。
- 在原始图像上再叠加其他退化因素(如运动模糊、湍流或其他噪声等)后再次进行实验,给出退化图像及恢复后的图像。
- 使用其他方法对图像进行恢复,对比效果。
- 最后显示结果注意归一化。
Prepare modules¶
文件 noise.py ,包含生成指数模糊卷积核、运动模糊卷积核、模糊图像、为图像添加高斯噪声等。
import cv2
import numpy as np
def exp_kernel(size=7, D0=120):
assert size % 2 == 1, "Kernel size must be odd."
center = size // 2
kernel = np.zeros((size, size), dtype=np.float32)
for i in range(size):
for j in range(size):
x = i - center
y = j - center
kernel[i, j] = np.exp(np.sqrt(x**2 + y**2) / D0)
kernel /= np.sum(kernel)
return kernel
def motion_kernel(size=7, angle=0):
assert size % 2 == 1, "Kernel size must be odd."
psf = np.zeros((size, size), dtype=np.float32)
psf[(size - 1) // 2, :] = 1.0
M = cv2.getRotationMatrix2D((size / 2 - 0.5, size / 2 - 0.5), angle, 1)
psf = cv2.warpAffine(psf, M, (size, size))
psf /= psf.sum()
return psf
def blur_image(image, kernel):
output = cv2.filter2D(image, ddepth=-1, kernel=kernel)
return output
def add_gaussian_noise(image, mean=0, var=25):
sigma = np.sqrt(var)
noise = np.random.normal(mean, sigma, image.shape).astype(np.float32)
output = image.astype(np.float32) + noise
output = np.clip(output, 0, 255).astype(np.uint8)
return output
文件 restore.py ,包含逆滤波、维纳滤波、最小平方法等图像复原的函数。
import numpy as np
def inverse_filter(image, H_degrade, k=0.5, d=0.1, eps=1e-3):
G = np.fft.fft2(image.astype(np.float32))
M = np.where(np.abs(H_degrade) <= d, k, 1.0 / (H_degrade + eps))
F_hat = G * M
f_hat = np.fft.ifft2(F_hat)
f_hat = np.real(f_hat).clip(0, 255).astype(np.uint8)
return f_hat
def wiener_filter(image, H_degrade, K=0.01):
G = np.fft.fft2(image.astype(np.float32))
M = np.conj(H_degrade) / (np.abs(H_degrade) ** 2 + K)
F_hat = G * M
f_hat = np.fft.ifft2(F_hat)
f_hat = np.real(f_hat).clip(0, 255).astype(np.uint8)
return f_hat
def cls_filter(image, H_degrade, s=0.01):
G = np.fft.fft2(image.astype(np.float32))
# fmt: off
lap = np.array([
[0, -1, 0],
[-1, 4, -1],
[0, -1, 0]
], dtype=np.float32)
# fmt: on
P = np.fft.fft2(np.fft.ifftshift(lap), s=image.shape)
M = np.conj(H_degrade) / (np.abs(H_degrade) ** 2 + s * np.abs(P) ** 2)
F_hat = G * M
f_hat = np.fft.ifft2(F_hat)
f_hat = np.real(f_hat).clip(0, 255).astype(np.uint8)
return f_hat
Task 1¶
先使用指数平滑函数 \(h(x,y)=\exp(\sqrt{x^2+y^2}/120)\) 卷积产生模糊,然后使用逆滤波进行图像恢复,逆滤波函数采用:
运行文件 task1.py ,得到结果:
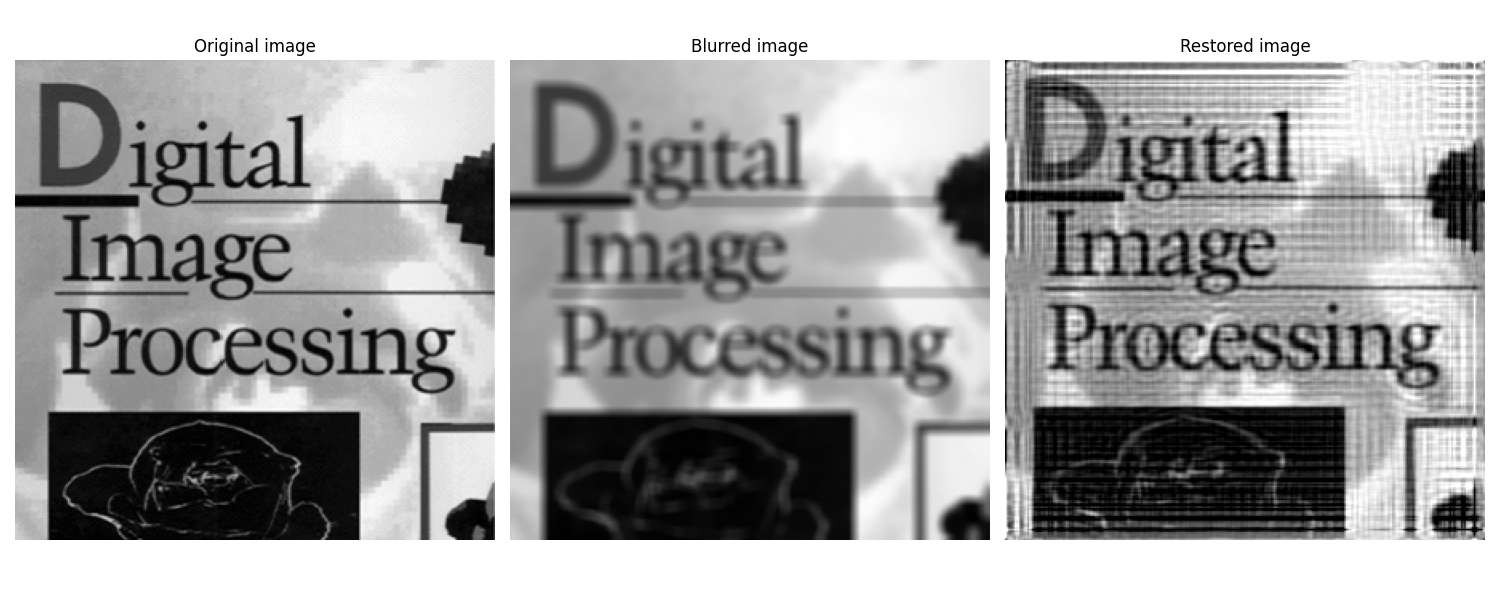
使用逆滤波之后,确实在一定程度上消除模糊、图像变得更加清晰,但是可以发现图像中出现很多横向和纵向的白色条纹,主要是因为退化函数 \(H(u,v)\) 在某些点频率值很低,几乎为零,因此频域做除法时,这些频率点会被过度放大,在时域呈现出周期性的、密密麻麻的细条纹和网格。这是已经对逆滤波加了限制之后的结果,如果不加限制,直接进行 \(\hat F(u,v)=\dfrac{G(u,v)}{H(u,v)}\) 处理,恢复后的图像将根本无法辨认。经过改进后的逆滤波需要选择一个较为平衡的 \(d\) 值,因为如果 \(d\) 值较小,高频分量越强,图像失真严重;如果 \(d\) 值较大,处理后图像仍较为模糊,复原效果不佳。
源代码 task1.py (绘图部分省略):
import cv2
import matplotlib.pyplot as plt
import numpy as np
from noise import blur_image, exp_kernel
from restore import inverse_filter
def main():
image = cv2.imread("data/DIP.bmp", cv2.IMREAD_GRAYSCALE)
kernel = exp_kernel(size=7, D0=120)
blurred_image = blur_image(image, kernel)
H = np.fft.fft2(np.fft.ifftshift(kernel), s=image.shape)
restored_image = inverse_filter(blurred_image, H, k=0.8, d=0.1, eps=0)
if __name__ == "__main__":
main()
Task 2¶
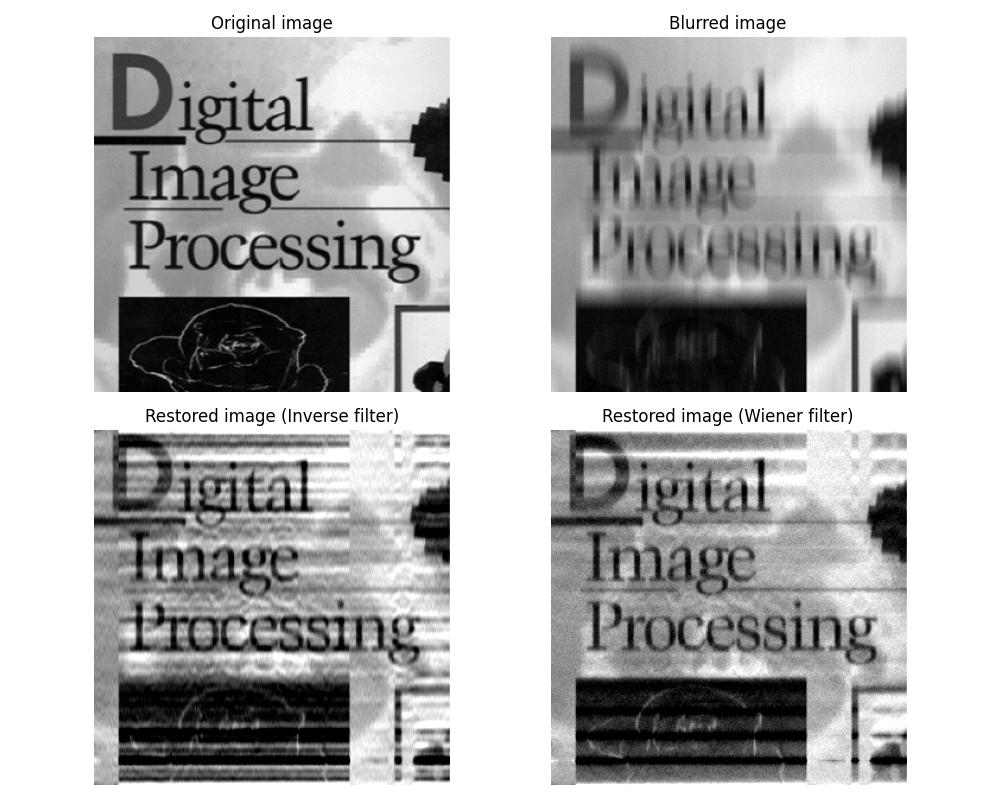
在 Task 1 中的得到的模糊图像中添加3种高斯噪声,均值为0,方差分别为 8, 16, 24 。3个图像分别进行逆滤波和维纳滤波。运行文件 task2.py ,效果对比如下:

维纳滤波同样出现了像逆滤波那样的白色细长条纹,但是效果稍好于逆滤波,主要也是因为维纳滤波中 \(K\) 值得选取,如果 \(K\) 值较小,则对高频率分量抑制效果不佳,条纹和网格越明显;如果 \(K\) 值较大,图像仍然模糊,恢复效果不佳。
源代码 task2.py (绘图部分省略):
import cv2
import matplotlib.pyplot as plt
import numpy as np
from noise import add_gaussian_noise, blur_image, exp_kernel
from restore import inverse_filter, wiener_filter
def main():
image = cv2.imread("data/DIP.bmp", cv2.IMREAD_GRAYSCALE)
kernel = exp_kernel(size=7, D0=120)
H = np.fft.fft2(np.fft.ifftshift(kernel), s=image.shape)
blurred = blur_image(image, kernel)
noisy_1 = add_gaussian_noise(blurred, mean=0, var=8)
noisy_2 = add_gaussian_noise(blurred, mean=0, var=16)
noisy_3 = add_gaussian_noise(blurred, mean=0, var=24)
inv_1 = inverse_filter(noisy_1, H, k=0.8, d=0.1, eps=0)
inv_2 = inverse_filter(noisy_2, H, k=0.8, d=0.1, eps=0)
inv_3 = inverse_filter(noisy_3, H, k=0.8, d=0.1, eps=0)
wiener_1 = wiener_filter(noisy_1, H, K=0.02)
wiener_2 = wiener_filter(noisy_2, H, K=0.02)
wiener_3 = wiener_filter(noisy_3, H, K=0.02)
if __name__ == "__main__":
main()
Task 3¶
在原始图像上加入运动模糊,
运行文件 task3.py ,效果如下:
可见,逆滤波和维纳滤波都较好地恢复了运动模糊,但是可以发现图像中竖直方向(也就是之前运动模糊的方向)似乎存在白色的、一些部位运动到别处的残影。原因可能是:在频域进行除法的时候,逆滤波和维纳滤波都会在一定程度上会把一些高频噪声放大(难以找到最合适的参数进行抑制),频域的乘除法对应时域的循环卷积,这些模糊部分会被周期性的搬移到这个方向上,产生残影。
源代码 task3.py (绘图部分省略):
import cv2
import matplotlib.pyplot as plt
import numpy as np
from noise import add_gaussian_noise, blur_image, motion_kernel
from restore import inverse_filter, wiener_filter
def main():
image = cv2.imread("data/DIP.bmp", cv2.IMREAD_GRAYSCALE)
size = 21
angle = 90
psf = motion_kernel(size, angle)
blurred = blur_image(image, psf)
blurred = add_gaussian_noise(blurred, mean=0, var=8)
H = np.fft.fft2(np.fft.ifftshift(psf), s=image.shape)
inv_restored = inverse_filter(blurred, H, k=0.8, d=0.1, eps=1e-3)
wiener_restored = wiener_filter(blurred, H, K=0.01)
if __name__ == "__main__":
main()
Task 4¶
使用最小平方法恢复图像, \(\hat F(u,v)=\dfrac{H^*(u,v)}{|H(u,v)|^2+s|P(u,v)|^2}G(u,v)\) .
运行文件 task4.py ,效果如下:
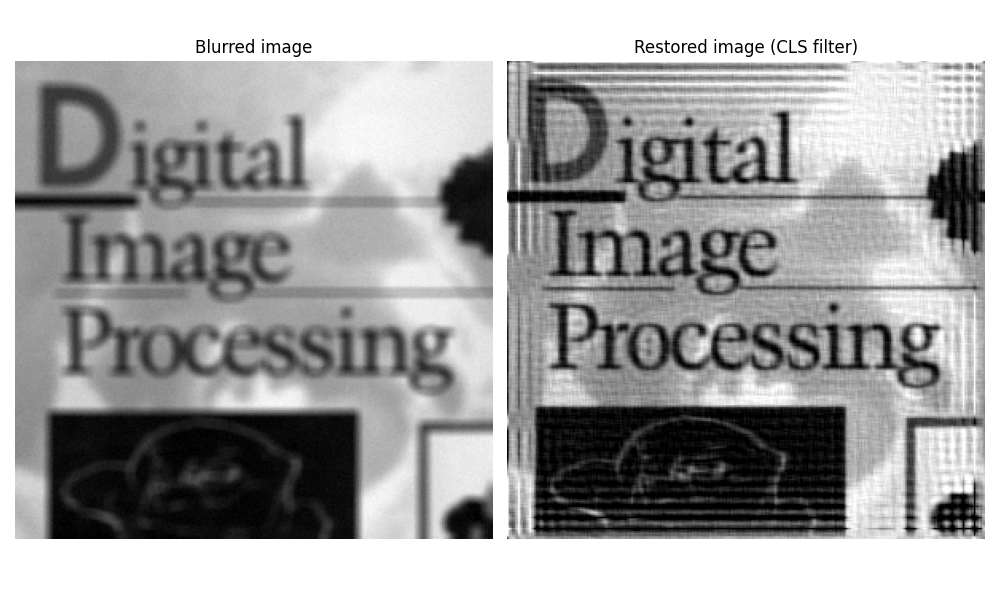
最小平方法与逆滤波和维纳滤波相比,没有出现在竖直方向上的残影,但是出现了类似之前处理卷积核模糊得到的结果的细小线条和网格。原因可能是拉普拉斯算子频域某些地方值也为0,此时 \(s|P(u,v)|^2\) 在分母上相当于不起作用,本应被抑制的高频成分局部放大,加上时域的循环卷积特性,导致出现细小的网格和条纹。
源代码 task4.py (绘图部分省略):
import cv2
import matplotlib.pyplot as plt
import numpy as np
from noise import add_gaussian_noise, blur_image, exp_kernel
from restore import cls_filter
def main():
image = cv2.imread("data/DIP.bmp", cv2.IMREAD_GRAYSCALE)
kernel = exp_kernel(size=7, D0=120)
H = np.fft.fft2(np.fft.ifftshift(kernel), s=image.shape)
blurred = blur_image(image, kernel)
blurred = add_gaussian_noise(blurred, mean=0, var=8)
cls_restored = cls_filter(blurred, H, s=0.001)
if __name__ == "__main__":
main()