12 系统的状态变量分析
状态/状态变量/状态矢量:一个动态系统的状态是表示系统的一组最少变量,只需知道 \(t=t_0\) 时刻这组变量和 \(t\geqslant t_0\) 时刻以后的输入, 就能确定系统在 \(t\geqslant t_0\) 时刻以后的行为。
引入状态变量的目的:使用中间变量表示每相邻阶输入输出的关系,可以把一元 \(N\) 阶方程转换为 \(N\) 元一阶方程,每一阶都用状态变量表示,相邻阶的中间变量之间是一阶关系。
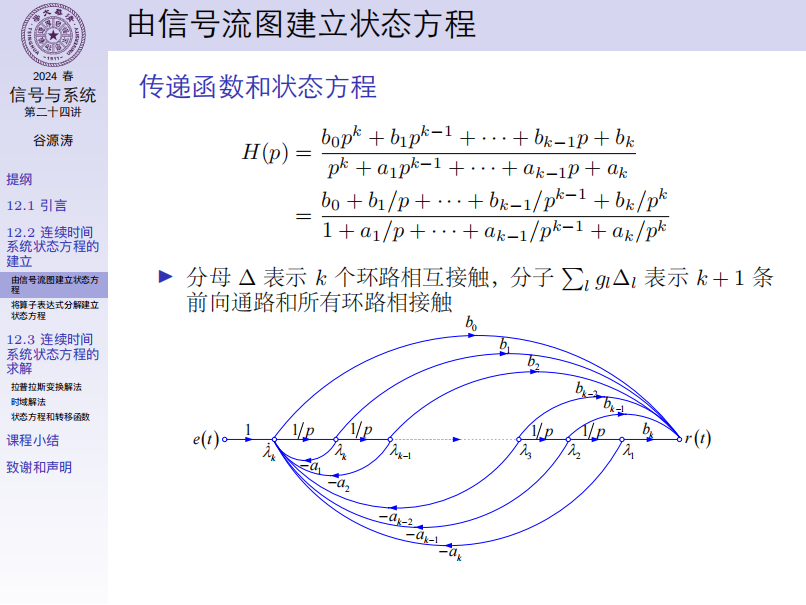
算子 \(p\) 是微分运算,算子 \(\dfrac{1}{p}\) 是积分运算。算子表达式就是关于积分和微分环节的组合。
12.1 连续时间系统状态方程的建立
状态方程与输出方程分别为:
\[ \begin{align*} \dot{\mathbf{\lambda}}(t)&=\mathbf{A\lambda}(t)+\mathbf{Be}(t) \\ \mathbf{r}(t)&=\mathbf{C\lambda}(t)+\mathbf{De}(t) \end{align*} \]
对于 LTI 系统, \(\mathbf{A},\mathbf{B},\mathbf{C},\mathbf{D}\) 矩阵是常数;对于时变系统 \(\mathbf{A},\mathbf{B},\mathbf{C},\mathbf{D}\) 矩阵是时间的函数。
状态方程的建立方法:
(1)由电路图建立(电路课的重点,非本课重点)。
(2)由系统输入输出方程或信号流图建立状态方程。对于与给定的系统,流图的形式可以不同,状态变量的选择不唯一, \(\mathbf{A},\mathbf{B},\mathbf{C},\mathbf{D}\) 矩阵也可能不唯一。
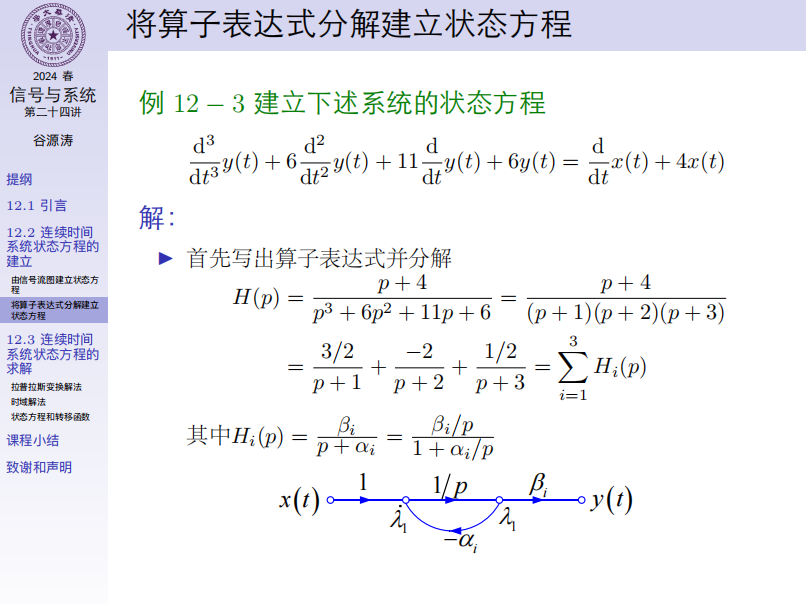
由算子表达式分解或系统函数建立状态方程。将表达式部分分式展开为 \(H(p)=\displaystyle\sum\dfrac{\beta_i}{p+\alpha_i}\) 的基本单元,由这些基本单元串联、并联、级联组装而成。
基本单元:
12.2 连续时间系统状态方程的求解
Laplace 变换解法
该方法是比较容易的方法。
对给定状态方程:
\[ \begin{align*} \dot{\mathbf{\lambda}}(t) &= \mathbf{A}\mathbf{\lambda}(t) + \mathbf{B}\mathbf{e}(t)\\ \mathbf{r}(t) &= \mathbf{C}\mathbf{\lambda}(t) + \mathbf{D}\mathbf{e}(t) \end{align*} \]
两侧做拉氏变换,将微分变成乘法:
\[ \begin{align*} s\mathbf{\Lambda}(s) - \mathbf{\lambda}(0_-) &= \mathbf{A}\mathbf{\Lambda}(s) + \mathbf{B}\mathbf{E}(s)\\ \mathbf{R}(s) &= \mathbf{C}\mathbf{\Lambda}(s) + \mathbf{D}\mathbf{E}(s) \end{align*} \]
由 \(s\) 域状态方程解出状态变量:
\[ \mathbf{\Lambda}(s) = (s\mathbf{I} - \mathbf{A})^{-1}\mathbf{\lambda}(0_-) + (s\mathbf{I} - \mathbf{A})^{-1}\mathbf{B}\mathbf{E}(s) \]
代入输出方程得到结果:
\[ \mathbf{R}(s) = \mathbf{C}(s\mathbf{I} - \mathbf{A})^{-1}\mathbf{\lambda}(0_-) + [\mathbf{C}(s\mathbf{I} - \mathbf{A})^{-1}\mathbf{B} + \mathbf{D}]\mathbf{E}(s) \]
定义特征矩阵 \(\mathbf{\Gamma}(s) = (s\mathbf{I} - \mathbf{A})^{-1}\) ,重写状态方程和输出方程:
\[ \begin{align*} \mathbf{\Lambda}(s) &= \mathbf{\Gamma}(s)\mathbf{\lambda}(0_-) + \mathbf{\Gamma}(s)\mathbf{B}\mathbf{E}(s) \\ \mathbf{R}(s) &= \mathbf{C}\mathbf{\Gamma}(s)\mathbf{\lambda}(0_-) + [\mathbf{C}\mathbf{\Gamma}(s)\mathbf{B} + \mathbf{D}]\mathbf{E}(s) \end{align*} \]
逆变换得到:
\[ \begin{align*} \mathbf{\lambda}(t) &= \underbrace{\gamma(t)\mathbf{\lambda}(0_-)}_{\text{零输入解}} + \underbrace{\gamma(t)\mathbf{B} * \mathbf{e}(t)}_{\text{零状态解}} \\ \mathbf{r}(t) &= \underbrace{\mathbf{C}\gamma(t)\mathbf{\lambda}(0_-)}_{\text{零输入响应}} + \underbrace{[\mathbf{C}\gamma(t)\mathbf{B} + \mathbf{D}\delta(t)] * \mathbf{e}(t)}_{\text{零状态响应}} \end{align*} \]
其中 \(\gamma(t) = \mathcal{L}^{-1}\{\mathbf{\Gamma}(s)\} = \mathcal{L}^{-1}\{(s\mathbf{I} - \mathbf{A})^{-1}\}\)
时域解法
推导过程比较繁琐,因此略去。
对比时域解法和拉氏变换域解法的结果:
\[ \begin{align*} \mathbf{\lambda}(t) &= e^{\mathbf{A}t}\mathbf{\lambda}(0_-) + e^{\mathbf{A}t}\mathbf{B} * \mathbf{e}(t) \quad \text{时域解法}\\ &= \underbrace{\gamma(t)\mathbf{\lambda}(0_-)}_{\text{零输入解}} + \underbrace{\gamma(t)\mathbf{B} * \mathbf{e}(t)}_{\text{零状态解}} \quad \text{变换域解法}\\ \mathbf{r}(t) &= \mathbf{C}e^{\mathbf{A}t}\mathbf{\lambda}(0_-) + [\mathbf{C}e^{\mathbf{A}t}\mathbf{B} + \mathbf{D}\delta(t)] * \mathbf{e}(t) \quad \text{时域解法}\\ &= \underbrace{\mathbf{C}\gamma(t)\mathbf{\lambda}(0_-)}_{\text{零输入响应}} + \underbrace{[\mathbf{C}\gamma(t)\mathbf{B} + \mathbf{D}\delta(t)] * \mathbf{e}(t)}_{\text{零状态响应}} \quad \text{变换域解法} \end{align*} \]
可发现特征矩阵和状态转移矩阵是一对拉氏变换对:
\[ \mathcal{L}\{e^{\mathbf{A}t}\} = \mathcal{L}\{\gamma(t)\} = \mathbf{\Gamma}(s) = (s\mathbf{I} - \mathbf{A})^{-1} \]
时域法关键是求 \(\mathrm{e}^{\mathbf{A}t}\) ,拉氏变换法关键是求 \((s\mathbf{I} - \mathbf{A})^{-1}\) . 两者本质相同,但前者要用凯莱-哈密顿定理,比较繁琐,后者相对容易。
12.3 根据状态方程求转移函数
考察完全解的变换式:
\[ \mathbf{R}(s) = \mathbf{C}(s\mathbf{I} - \mathbf{A})^{-1}\boldsymbol{\lambda}(0_-) + [\mathbf{C}(s\mathbf{I} - \mathbf{A})^{-1}\mathbf{B} + \mathbf{D}]\mathbf{E}(s) \]
零状态时有:
\[ \mathbf{R}(s) = [\mathbf{C}(s\mathbf{I} - \mathbf{A})^{-1}\mathbf{B} + \mathbf{D}]\mathbf{E}(s) = \mathbf{H}(s)\mathbf{E}(s) \]
即:
\[ \mathbf{H}(s) = \mathbf{C}(s\mathbf{I} - \mathbf{A})^{-1}\mathbf{B} + \mathbf{D} \]
假设单输入单输出,有:
\[ \begin{align*} \mathbf{H}(s) &= \mathbf{C}_{1\times k}(s\mathbf{I}_{k\times k} - \mathbf{A}_{k\times k})^{-1}\mathbf{B}_{k\times 1} + \mathbf{D}\\ &= \frac{\mathbf{C}_{1\times k}\text{adj}(s\mathbf{I} - \mathbf{A})\mathbf{B}_{k\times 1} + \mathbf{D}}{|s\mathbf{I} - \mathbf{A}|} \end{align*} \]
\(|s\mathbf{I} - \mathbf{A}| = 0\) 之根就是 \(\mathbf{H}(s)\) 的极点,即 \(\mathbf{A}\) 的特征值。
12.4 离散时间系统状态方程的建立
同连续时间系统的形式,用差分代替微分。
\[ \begin{align*} \mathbf{\lambda}(n+1)&=\mathbf{A\lambda}(n)+\mathbf{Bx}(n) \\ \mathbf{y}(n)&=\mathbf{C\lambda}(n)+\mathbf{Dx}(n) \end{align*} \]
建立方法:
12.5 离散时间系统状态方程的求解
时域迭代法
如果 \(n_0 = 0\) ,则有:
\[ \begin{align*} \lambda(n) &= \mathbf{A}^n \lambda(0) u(n) \left[ \sum_{i=0}^{n-1} \mathbf{A}^{n-1-i} \mathbf{B} \mathbf{x}(i) \right] u(n - 1) \\ &= \mathbf{A}^n \lambda(0) u(n) \mathbf{A}^{n-1} \mathbf{B} u(n - 1) \mathbf{x}(n) \end{align*} \]
代入输出方程:
\[ \begin{align*} \mathbf{y}(n) &= \mathbf{C}\lambda(n) + \mathbf{D}\mathbf{x}(n)\\ \mathbf{y}(n) &= \underbrace{\mathbf{C}\mathbf{A}^n \lambda(0) u(n)}_{\text{零输入响应}} + \underbrace{\left[ \mathbf{C}\mathbf{A}^{n-1} \mathbf{B} u(n-1) + \mathbf{D}\delta(n) \right] \mathbf{x}(n)}_{\text{零状态响应}} \end{align*} \]
考察零状态响应,得到:
\[ \mathbf{h}(n) = \mathbf{C}\mathbf{A}^{n-1} \mathbf{B} u(n - 1) + \mathbf{D}\delta(n) \]
定义离散状态转移矩阵 \(\mathbf{A}^n\) ,类似于连续系统的 \(\mathrm{e}^{\mathbf{A}t}\) .
z 变换法
已知状态方程和输出方程:
\[ \begin{cases} \mathbf{\lambda}(n+1) = \mathbf{A}\mathbf{\lambda}(n) + \mathbf{B}\mathbf{x}(n) \\ \mathbf{y}(n) = \mathbf{C}\mathbf{\lambda}(n) + \mathbf{D}\mathbf{x}(n) \end{cases} \]
两侧同取 \(z\) 变换得到:
\[ \begin{cases} z\mathbf{\lambda}(z) - z\mathbf{\lambda}(0) = \mathbf{A}\mathbf{\Lambda}(z) + \mathbf{B}\mathbf{X}(z) \\ \mathbf{Y}(z) = \mathbf{C}\mathbf{\Lambda}(z) + \mathbf{D}\mathbf{X}(z) \end{cases} \]
由 \(z\) 域状态方程解出状态变量:
\[ \mathbf{\Lambda}(z) = (z\mathbf{I} - \mathbf{A})^{-1}z\mathbf{\lambda}(0) + (z\mathbf{I} - \mathbf{A})^{-1}\mathbf{B}\mathbf{X}(z) \]
两侧同取逆 \(z\) 变换解出:
\[ \mathbf{\lambda}(n) = \mathcal{Z}^{-1}\left[(z\mathbf{I} - \mathbf{A})^{-1}z\right]\mathbf{\lambda}(0) + \mathcal{Z}^{-1}\left[(z\mathbf{I} - \mathbf{A})^{-1}\right]\mathbf{B} * \mathbf{x}(n) \]
注意和连续情况拉氏变换解在形式上的区别。
对照 \(z\) 变换解和时域解:
\[ \begin{align*} \lambda(n) &= \mathcal{Z}^{-1}\left[(z\mathbf{I} - \mathbf{A})^{-1}z\right]\lambda(0) + \mathcal{Z}^{-1}\left[(z\mathbf{I} - \mathbf{A})^{-1}\right]\mathbf{B}* \mathbf{x}(n) \\ &= \underbrace{\mathbf{A}^n\lambda(0)u(n)}_{\text{零输入解}} + \underbrace{\mathbf{A}^{n-1}\mathbf{B}u(n - 1) * \mathbf{x}(n)}_{\text{零状态解}}\\ \mathbf{y}(n) &= \mathbf{C}\mathcal{Z}^{-1}\left[(z\mathbf{I} - \mathbf{A})^{-1}z\right]\lambda(0) + \left\{\mathbf{C}\mathcal{Z}^{-1}\left[(z\mathbf{I} - \mathbf{A})^{-1}\right]\mathbf{B} + \mathbf{D}\delta(n)\right\} _\mathbf{x}(n) \\ &= \underbrace{\mathbf{C}\mathbf{A}^n\lambda(0)u(n)}_{\text{零输入响应}} + \underbrace{\left[\mathbf{C}\mathbf{A}^{n-1}\mathbf{B}u(n - 1) + \mathbf{D}\delta(n)\right] * \mathbf{x}(n)}_{\text{零状态响应}} \end{align*} \]
得到对应关系:
\[ \begin{align*} \mathbf{A}^nu(n) &= \mathcal{Z}^{-1}\left[(z\mathbf{I} - \mathbf{A})^{-1}z\right] \\ \mathbf{A}^{n-1}u(n - 1) &= \mathcal{Z}^{-1}\left[(z\mathbf{I} - \mathbf{A})^{-1}\right] \end{align*} \]
对比连续时间系统的 \(\mathcal{L}^{-1}\left\{(s\mathbf{I} - \mathbf{A})^{-1}\right\} = \mathrm{e}^{\mathbf{A}t}\) ,用类似方法可求得 \(\mathbf{H}(z) = \mathbf{C}(z\mathbf{I} - \mathbf{A})^{-1}\mathbf{B} + \mathbf{D}\) .
12.6 状态矢量的线性变换
选择不同的状态矢量可以得到不同的 \(\mathbf{A},\mathbf{B},\mathbf{C},\mathbf{D}\) 矩阵,各状态矢量之间存在某种约束,矩阵 \(\mathbf{A},\mathbf{B},\mathbf{C},\mathbf{D}\) 之间存在某种变换关系。
连续时间系统的 BIBO 稳定性:
- 系统转移函数为 \(\mathbf{H}(s)=\mathbf{C}(s\mathbf{I}-\mathbf{A})^{-1}\mathbf{B}+\mathbf{D}\) .
- \(|s\mathbf{I}-\mathbf{A}|=0\) 的根, \(\mathbf{A}\) 的特征根,就是 \(\mathbf{H}(s)\) 的极点。
- 若上述的根/极点在 \(s\) 平面左半平面,则系统稳定。
离散时间系统的 BIBO 稳定性:
- 系统转移函数为 \(\mathbf{H}(z)=\mathbf{C}(z\mathbf{I}-\mathbf{A})^{-1}\mathbf{B}+\mathbf{D}\) .
- \(|z\mathbf{I}-\mathbf{A}|=0\) 的根, \(\mathbf{A}\) 的特征根,就是 \(\mathbf{H}(z)\) 的极点。
- 若上述的根/极点在 \(z\) 平面左半平面,则系统稳定。
12.7 系统的可控性和可观性
可控性(Controllability):给定起始状态,可以找到容许的输入量 (控制矢量),在有限时间内把系统的所有状态引向零状态。如果可做到这点,则称系统完全可控。
可观性(Observability):给定输入 (控制) 后,能在有限时间内根据系统输出唯一地确定系统的起始状态。如果可做到这点,则称系统完全可观。
利用可控阵和可观阵判定:
若
\[ \mathbf{M} = \left[ \mathbf{B} \quad \mathbf{A}\mathbf{B} \quad \cdots \quad \mathbf{A}^{k-1}\mathbf{B} \right] \]
为行满秩,即 \(\operatorname{rank}(\mathbf{M}) = k\) ,则系统完全可控。
若
\[ \mathbf{N} = \begin{bmatrix} \mathbf{C} \\ \mathbf{C}\mathbf{A} \\ \vdots \\ \mathbf{C}\mathbf{A}^{k-1} \end{bmatrix} \]
为列满秩,即 \(\operatorname{rank}(\mathbf{N}) = k\) ,则系统完全可观。
可控性只和 \(\mathbf{A},\mathbf{B}\) 有关,可观性只和 \(\mathbf{A},\mathbf{C}\) 有关。
零极点相消现象:
\(H(s)\) 原有 \(k\) 个极点,有项消失(即零极点对消)后则极点不到 \(k\) 个(降阶); 零极点相消部分是不可控、不可观的部分,因而转移函数的描述方式只反映了系统中可观可控的部分,不能反映不可观、不可控的部分。所以用转移函数描述系统是不全面的,而用状态方程和输出方程描述系统更全面、详尽。