Week 8 Assignment¶
题目要求:
编程(可调用内置函数)对比 Robert 算子,Sobel 算子,Laplace 算子和 Canny 算子在所给图片的边缘检测效果并加以分析。在边缘检测结果的基础上利用 Hough 变换进行直线检测。
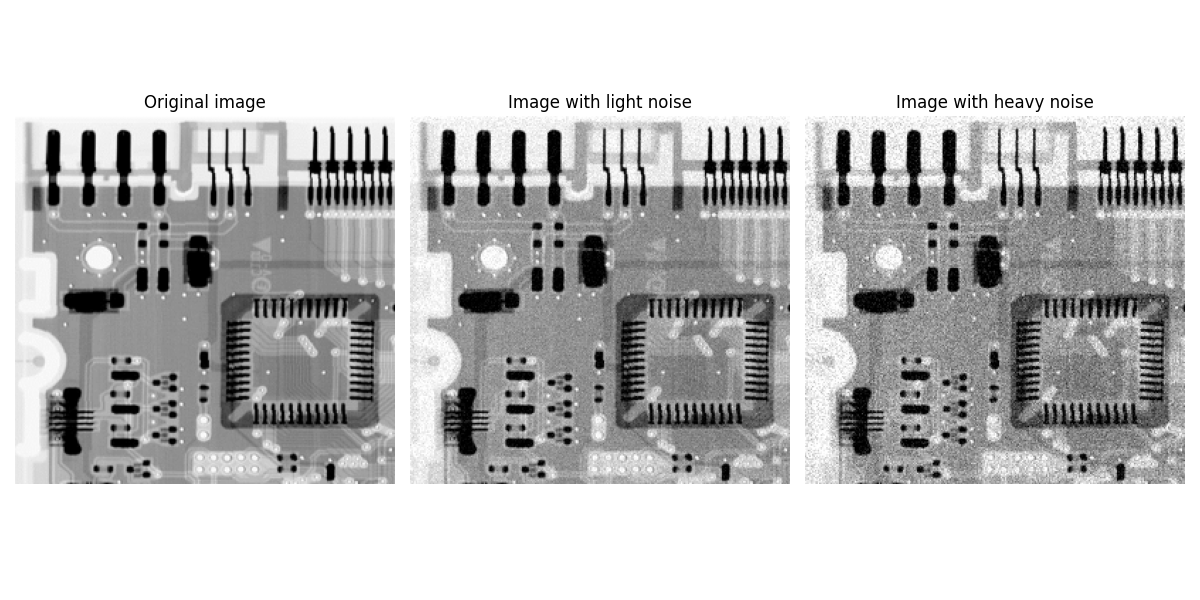
原图像为 ./digital_image_hw8_img1.png ,首先运行 ./add_noise.py 文件,对原图像添加轻度和重度的高斯噪声,分别得到 ./digital_image_hw8_img2.png 和 ./digital_image_hw8_img3.png ,三张图像的对比图为:
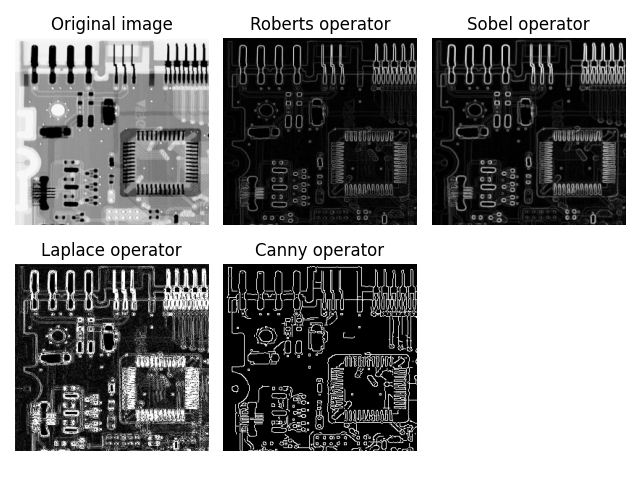
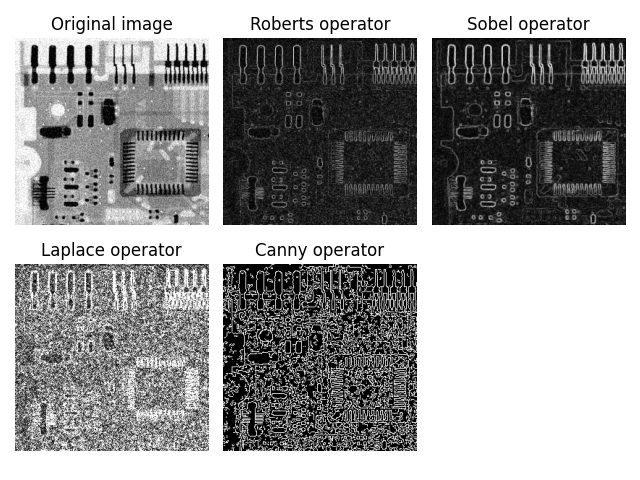
进行边缘检测和直线检测的源代码为 ./main.py ,对原图像运行,可以得到四种边缘检测结果:
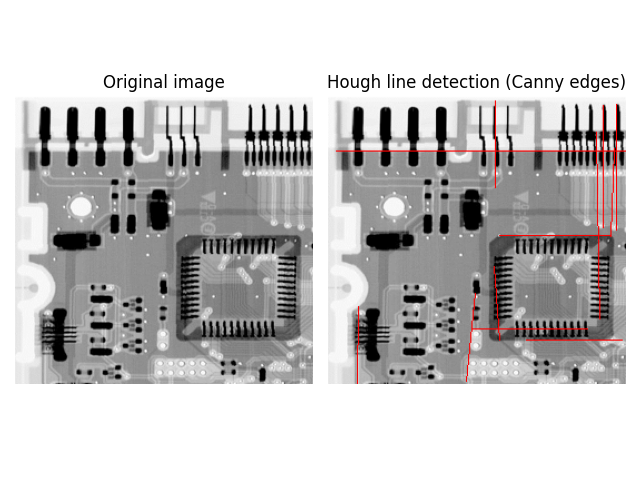
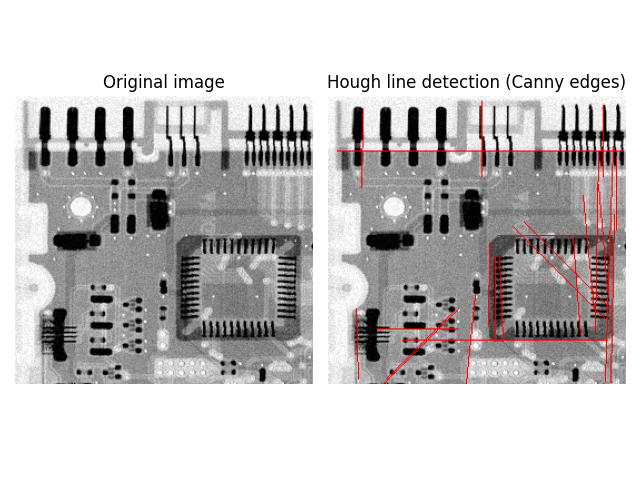
对 Canny 检测结果进行 Hough 变换,得到直线检测结果:
可见,4种边缘检测算法均能较好的提取边缘,其中 Roberts 和 Sobel 提取的结果接近,但是 Sobel 提取的边缘似乎亮度更大一点。Laplace 提取的边缘宽度在视觉上更大,可能是因为作为二级梯度算子,在边缘处垂直明暗变化时经过两次求导,会出现两个尖峰。Canny 算法包含高斯平滑滤波、非极大值抑制、双阈值检测等优化方式,因此提取的边缘亮度均匀,且更加符合实际边缘。
在进行直线检测时,由于图像边缘错综复杂,因此检测结果受 Hough 变换的参数影响较大,但是对于 Canny 算子提取的边缘仍能够提取出原图像中较为明显的直线,比如图像上方的较长的恒直线、右下角正方形的四条边。
对添加轻度噪声的图像做同样操作,得到结果:
在添加轻度噪声时,对4种边缘检测均产生了干扰,Roberts 算子和 Sobel 算子的检测结果中,背景亮度稍有提高,整体但边缘结果仍较为明显,受影响程度较低。而 Laplace 算子受影响最大,因为它是二阶梯度算子,对噪声十分敏感,其检测结果已经几乎被噪声填满,难以看出边缘。Canny 算子检测图像中边缘原有边缘处伸展出一些噪点,一些背景处出现了一些孤立的噪声点群,可能会对直线检测造成干扰,背景依然保持黑色,与边缘对比度明显。
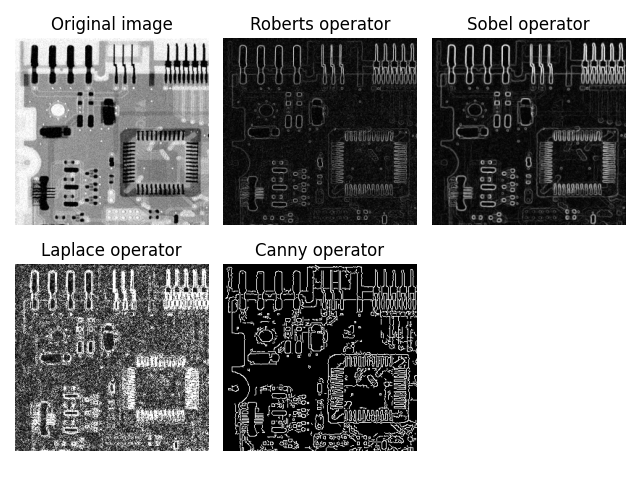
对添加重度噪声的图像做同样操作,得到结果:
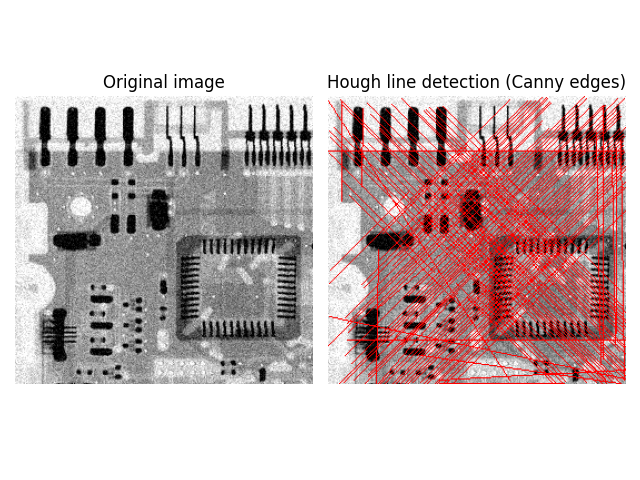
此时仍是 Roberts 算子和 Sobel 算子检测效果较好,且 Sobel 算子最好,在较大噪声情况下,原图像主要边缘(上方针脚、左下方几个圆边矩形、右下角芯片针脚)仍然较为清晰,可能原因是 Sobel 核相比 Roberts 更大、更平滑,抗噪能力更强。而 Laplace 算子和 Canny 算子已经完全被噪声淹没,无法识别出边缘信息。
对于直线检测结果(不同图像都使用相同的 Hough 直线检测参数),在添加轻度噪声时,相比于原图像,在右下方正方形芯片处增加了几条直线,主要原因是该处黑色针脚密集,遍布在正方形框的四周,增加噪声之后多检测出了几条竖向直线和斜向直线。对于重度噪声的图像,由于边缘检测结果已经“面目全非”,其直线检测结果几乎全部是两种斜向 \(45^\circ\) 的直线,掩盖了原有边缘直线,失去了参考意义。
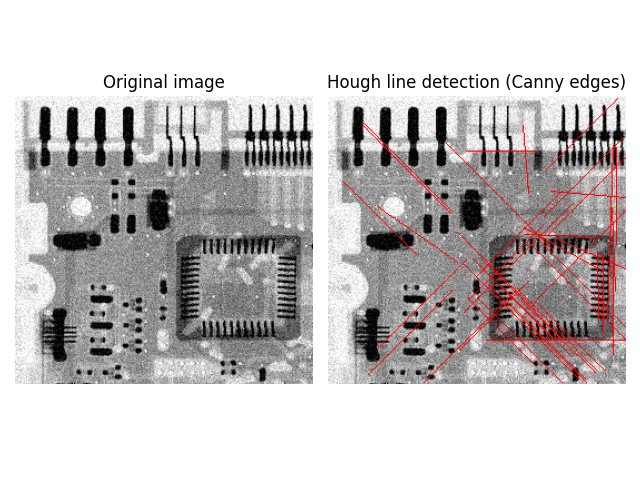
如果此时修改 Hough 直线检测的参数,将 HoughLinesP 的参数 maxLineGap 减小为5,如下图,此时斜向错误直线的识别减少,但是原图像的一些边缘没有识别出来,尤其是图像上方一条最长的横向直线在修改参数之后变得很短,原因是噪声使原本的直线出现中断,而参数 maxLineGap 的意义是允许将两条直线是为同一条直线时它们的最小间隔,因此受噪声影响原本的长直线被分割为若干段直线,大部分因为长度没有超过阈值被忽略,而最后只剩下中间的一条中等长度的直线。
源代码文件 main.py :
import cv2
import matplotlib.pyplot as plt
import numpy as np
def roberts_edge(image):
kernel_x = np.array([[1, 0], [0, -1]], dtype=np.float32)
kernel_y = np.array([[0, 1], [-1, 0]], dtype=np.float32)
grad_x = cv2.filter2D(image, cv2.CV_64F, kernel_x)
grad_y = cv2.filter2D(image, cv2.CV_64F, kernel_y)
output = cv2.magnitude(grad_x, grad_y)
output = cv2.normalize(output, None, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U)
return output
def sobel_edge(image):
grad_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
grad_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
output = cv2.magnitude(grad_x, grad_y)
output = cv2.normalize(output, None, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U)
return output
def laplace_edge(image):
output = cv2.Laplacian(image, cv2.CV_64F, ksize=3)
output = cv2.convertScaleAbs(output)
return output
def hough_transform(image, edge):
lines = cv2.HoughLinesP(
edge,
rho=1, # 距离精度
theta=np.pi / 180, # 角度精度
threshold=80, # 阈值
minLineLength=60, # 最小可接受线段长度
maxLineGap=5, # 最大线段间隔
)
image_lines = cv2.cvtColor(image, cv2.COLOR_GRAY2BGR)
if lines is not None:
for line in lines:
x1, y1, x2, y2 = line[0]
# 画红色线,线条宽度为1像素
cv2.line(image_lines, (x1, y1), (x2, y2), (0, 0, 255), 1)
return image_lines
def main():
image_path = "./digital_image_hw8_img3.png"
image = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE)
result_roberts = roberts_edge(image)
result_sobel = sobel_edge(image)
result_laplace = laplace_edge(image)
result_canny = cv2.Canny(image, 100, 200)
plt.figure()
plt.subplot(2, 3, 1)
plt.imshow(image, cmap="gray")
plt.title("Original image")
plt.axis("off")
plt.subplot(2, 3, 2)
plt.imshow(result_roberts, cmap="gray")
plt.title("Roberts operator")
plt.axis("off")
plt.subplot(2, 3, 3)
plt.imshow(result_sobel, cmap="gray")
plt.title("Sobel operator")
plt.axis("off")
plt.subplot(2, 3, 4)
plt.imshow(result_laplace, cmap="gray")
plt.title("Laplace operator")
plt.axis("off")
plt.subplot(2, 3, 5)
plt.imshow(result_canny, cmap="gray")
plt.title("Canny operator")
plt.axis("off")
plt.tight_layout()
plt.savefig("./digital_image_hw8_edge3.png")
plt.show()
# 对 Canny 算子边缘检测结果进行 Hough 变换
image_lines = hough_transform(image, result_canny)
plt.figure()
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
plt.title("Original image")
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(cv2.cvtColor(image_lines, cv2.COLOR_BGR2RGB))
plt.title("Hough line detection (Canny edges)")
plt.axis("off")
plt.tight_layout()
plt.savefig("./digital_image_hw8_line31.png")
plt.show()
if __name__ == "__main__":
main()
添加高斯噪声 add_noise.py :
import cv2
import matplotlib.pyplot as plt
import numpy as np
def add_gaussian_noise(image, mean=0, sigma=10):
noise = np.random.normal(mean, sigma, image.shape).astype(np.float32)
noisy_image = image.astype(np.float32) + noise
noisy_image = np.clip(noisy_image, 0, 255).astype(np.uint8)
return noisy_image
def main():
img = cv2.imread("./digital_image_hw8_img1.png", cv2.IMREAD_GRAYSCALE)
# 添加轻度高斯噪声
light_noise_img = add_gaussian_noise(img, mean=0, sigma=10)
# 添加重度高斯噪声
heavy_noise_img = add_gaussian_noise(img, mean=0, sigma=20)
cv2.imwrite("digital_image_hw8_img2.png", light_noise_img)
cv2.imwrite("digital_image_hw8_img3.png", heavy_noise_img)
plt.figure(figsize=(12, 6))
plt.subplot(1, 3, 1)
plt.title("Original image")
plt.imshow(img, cmap="gray")
plt.axis("off")
plt.subplot(1, 3, 2)
plt.title("Image with light noise")
plt.imshow(light_noise_img, cmap="gray")
plt.axis("off")
plt.subplot(1, 3, 3)
plt.title("Image with heavy noise")
plt.imshow(heavy_noise_img, cmap="gray")
plt.axis("off")
plt.tight_layout()
plt.savefig("digital_image_hw8_img_noise.png")
plt.show()
if __name__ == "__main__":
main()